





























7.8 Absolute Encoders
7.8.1 Connecting an Absolute Encoder
7-31
7
Application Functions
7.8
Absolute Encoders
The absolute encoder records the current position of the stop position even when the power supply is
OFF.
With a system that uses an absolute encoder, the host controller can monitor the current position.
Therefore, it is not necessary to perform an origin return operation when the power supply to the sys-
tem is turned ON.
There are two types of encoders for Rotary Servomotors. The usage of the encoder is specified in
Pn002 = n.
X
.
Refer to the following section for encoder models.
•
Parameter Settings When Using an Incremental Encoder
•
Parameter Settings When Using a Multiturn Absolute Encoder
7.8.1
Connecting an Absolute Encoder
You can get the position data from the absolute encoder with EtherCAT communications. Therefore, it
is not necessary to wire the PAO, PBO, and PCO (Encoder Divided Pulse Output) signals.
If they need to be wired, refer to the following section.
Wiring the SERVOPACK to the Encoder
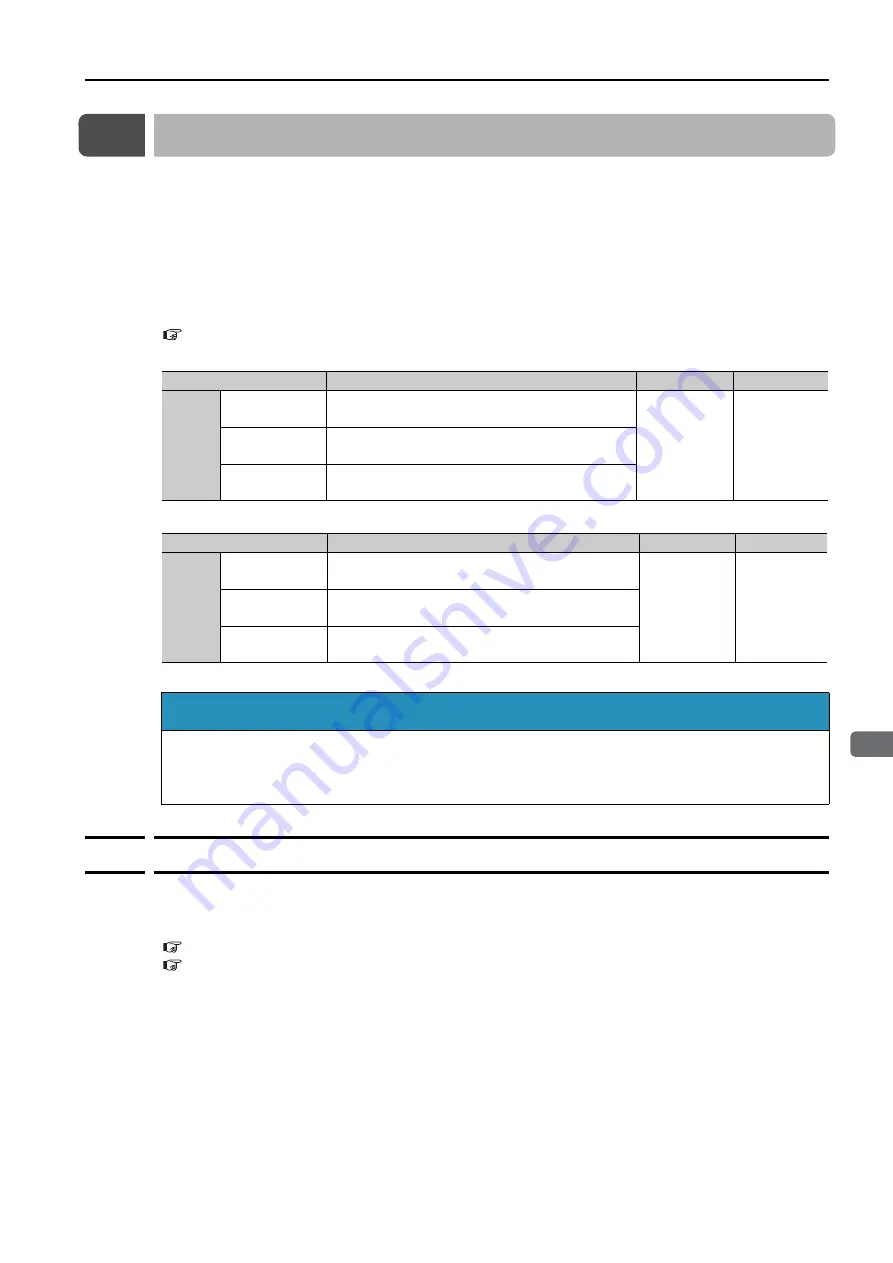
Parameter
Meaning
When Enabled Classification
Pn002
(2002h)
n.
0
(default setting)
Use the encoder as an incremental encoder.
A battery is not required.
After restart
Setup
n.
1
Use the encoder as an incremental encoder.
A battery is not required.
n.
2
Use the encoder as a single-turn absolute encoder.
A battery is not required.
Parameter
Meaning
When Enabled Classification
Pn002
(2002h)
n.
0
(default setting)
Use the encoder as a multiturn absolute encoder.
A battery is required.
After restart
Setup
n.
1
Use the encoder as an incremental encoder.
A battery is not required.
n.
2
Use the encoder as a single-turn absolute encoder.
A battery is not required.
NOTICE
Install a battery at either the host controller or on the Encoder Cable.
If you install batteries both at the host controller and on the Encoder Cable at the same time, you
will create a loop circuit between the batteries, resulting in a risk of damage or burning.







































































