



























Installation
4
-
19
4.2
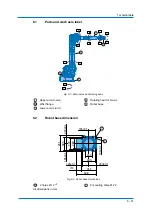
Ambient conditions and installation location
When installing a robot, it is necessary to satisfy the undermentioned environmental
conditions:
•
Ambient temperature: from 0° C to + 45° C.
•
Air humidity: 20% to 80% relative humidity (non-condensing).
•
Free of corrosive gases, liquids, or explosive gases.
•
Free from excessive vibration (Vibration acceleration: 4.9 m/s² [0.5 G] or less).
•
Maximum unevenness of the support surface of the robot base: 0.5 mm.







































































