8.5 Installing Peripheral Devices
8.5
Installing Peripheral Devices
This section describes the proper steps and precautions to take when installing or connecting various peripheral devices
to the drive.
N OTICE:
U se a cla s s 2 p o w e r s u p p ly (UL stan dard ) w hen c o n n e c tin g to the c o n tro l term inals. Im p ro p e r a p p lic a tio n o f p e rip h e ra l
d e vice s c o u ld re s u lt in drive p e rfo rm a n c e d e g ra d a tio n due to im p ro p e r p o w e r supply. R e fe r to N E C A rtic le 725 C lass 1, C lass 2, an d
C lass 3 R e m ote-C o ntrol, S ignaling, a n d P o w e r L im ite d C irc u its fo r re q u ire m e n ts c o n c e rn in g c la ss 2 p o w e r supplies.
♦ Dynamic Braking Options
A braking resistor or an external braking transistor combined with a braking resistor must be installed in order to
dissipate the energy fed back to the drive during regenerative operation.
N OTICE:
D o n o t a llo w u n q u a lifie d p e rs o n n e l to use the p ro du ct. F a ilu re to c o m p ly c o u ld re s u lt in d a m a g e to the drive o r b ra k in g
circuit. C a re fu lly re v ie w the b ra k in g re s is to r in s tru c tio n m a n u a l w h en c o n n e c tin g a b ra k in g re s is to r o p tio n to the drive.
Note: The braking circuit must be sized properly in order to dissipate the power required to decelerate the load in the desired time.
Ensure that the braking circuit can dissipate the energy for the set deceleration time prior to running the drive.
W ARNING!
F ire H azard. The b ra k in g re s is to r c o n n e c tio n te rm in a ls are B1 a n d B2. D o n o t c o n n e c t a b ra k in g re s is to r d ire c tly to any
o th e r term inals. Im p ro p e r w irin g co n n e c tio n s c o u ld re s u lt in de a th o r s e rio u s in ju ry b y fire. F a ilu re to c o m p ly m a y re s u lt in d a m a g e to
the b ra k in g c irc u it o r drive.
N OTICE:
C o n n e c t b ra k in g circ u its to th e drive as sh o w n in the I/O w irin g exam ples. Im p ro p e rly w irin g b ra k in g circu its c o u ld re s u lt in
da m a g e to the d riv e o r equipm ent.
■ Installing Braking Resistors
W ARNING!
F ire hazard. A lw a y s use b ra k in g re s is to rs th a t are e q u ip p e d w ith a th e rm a l o v e rlo a d re la y contact, a n d utilize this c on tact
to s w itc h o ff the drive in case o f b ra k in g re s is to r overheat. W hen c o n n e c tin g the b ra k in g re s is to rs to the drive in te rn a l b ra k in g
transistor, m a k e sure the b ra k in g tra n s is to r w ill n o t be o v e rlo a d e d w ith the re q u ire d d u ty cycle a n d the s e le c te d re s is ta n c e value.
F a ilu re to c o m p ly c o u ld re s u lt in de a th o r s e rio u s in ju ry b y fire from o v e rh e a tin g resistors.
Always use braking resistors equipped with a thermal overload relay contact, and utilize this contact to switch off the
drive in case of braking resistor overheat. When connecting the braking resistors to the drive internal braking transistor,
make sure the braking transistor will not be overloaded with the required duty cycle and the selected resistance value.
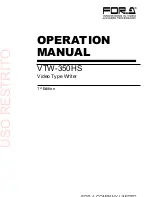
■ Installing a Braking Unit: CDBR Type
When using a CDBR braking unit or any other external braking transistor or a regenerative converter, disable the internal
braking transistor protection function by setting parameter L8-55 to 0.
To install a CDBR type braking unit, connect either the B1 terminal o f the drive (CIMR-LD2A0018A through 2A0115
and CIMR-LD4A0009 through 4A0060) or +3 terminal of the drive (units CIMR-LD2A0145 to 2A0415 and CIMR-
LD4A0075 to 4A0216) to the positive terminal on the braking unit. Then, wire the negative terminals on the drive and
braking unit together. Te2 is not used.
Connect the braking resistor to CDBR ter0 and -0.
Wire the thermal overload relay contact of the CDBR and the braking resistor in series, and connect this signal to a drive
digital input. Use this input to trigger a fault in the drive in case a CDBR or braking resistor overload occurs.
Disable dynamic braking transistor protection by setting L8-55 = 0.
Note: To install a CDBR type braking unit to the drive w ith built-in dynamic braking transistor (C IM R-LD 2A 0004 through 2A0138
and C IM R -LD 4A 0002 through 4A 0072), connect the drive’s B1 terminal to the positive terminal on the braking unit. N ext wire
the negative terminals on the drive and braking unit together. Terminal B 2 is not used.
B r a k i n g U n i t
( C D B R t y p e )
B r a k i n g R e s i s t o r
IE
T h e r m a l
T r i p C o n t a c t
F ig u r e 8 .1 5 C o n n e c ti n g a B ra k in g U n it (C D B R ty p e ) a n d B ra k in g R e s i s t o r U nit
(C IM R -L C 2A 0145 to 2 A 0 4 1 5 a n d L C 4 A 0 0 7 5 to 4 A 0216)
+ 3
+ 0
o--------------0 -
D r i v e
© 0
v
1
------------------------ Q -
T h e r m a l O v e r l o a d
T r i p C o n t a c t
YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual
305
P
e
ri
p
h
e
ra
l
D
e
v
ic
e
s
&
O
p
ti
o
n
s
Содержание L1000A Series
Страница 68: ...3 11 Wiring Checklist 72 YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual...
Страница 264: ...6 8 Diagnosing and Resetting Faults 268 YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual...
Страница 308: ...8 5 Installing Peripheral Devices 312 YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual...
Страница 316: ...A 5 Drive Derating Data 320 YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual...
Страница 390: ...C 12 Self Diagnostics 394 YASKAWA ELECTRIC SIEP C710616 33D YASKAWA AC Drive L1000A Technical Manual...