





























3.12 Controllability Problems and Possible Solutions
238
YASKAWA
SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual
3.12 Controllability Problems and Possible Solutions
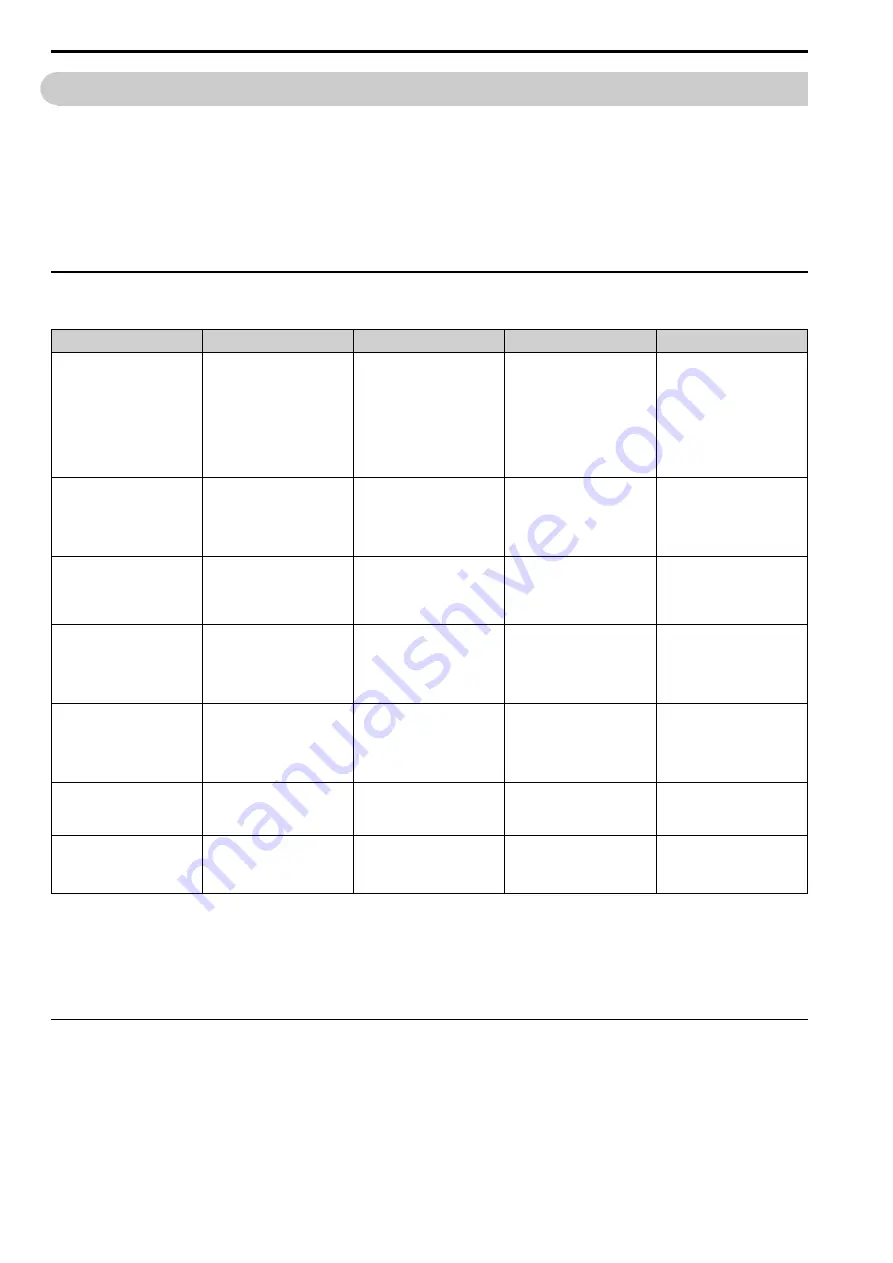
The following explains the adjustment procedures to follow when issues such as hunting or oscillation attributable
to control functionality occur during a test run. Adjust the relevant parameters appearing in the chart, in
accordance with the control method being used and the drive status.
Note:
•
In this section, only the parameters that are frequently adjusted are listed. Please consult with a Yaskawa representative if adjustments
having a higher degree of precision are required.
•
The method for making adjustments is different when synchronizing 2 drives, and when using a single drive that switches between
multiple motors. For such installations, consult with Yaskawa before making any drive settings or drive adjustments.
◆
V/f Control and Closed Loop V/f Control
Table 3.29 Parameters for Fine Tuning the Drive (V/f Control and Closed Loop V/f Control Methods)
Issue
Parameter Number
Possible Solutions
Default
Recommended Setting
Hunting or oscillation at mid-
range speeds (10 Hz to 40 Hz)
n1-02 [Hunting Prevention Gain
Setting]
•
If torque is not sufficient with
heavy loads, decrease the
setting value.
•
If hunting or oscillation occur
with light loads, increase the
setting value.
•
If hunting occurs with a low-
inductance motor, for example
a motor with a larger frame
size, lower the setting value.
1.00
0.10 - 2.00
•
The volume of the motor
excitation sound is too high.
•
Hunting or oscillation at low
speeds (10 Hz or lower), or at
mid-range speeds (10 Hz to 40
Hz)
C6-02 [Carrier Frequency
Selection]
•
If the volume of the motor
excitation sound is too high,
increase the carrier frequency.
•
If hunting or oscillation occur
at low or mid-range speeds,
decrease the carrier frequency.
1 (2 kHz)
1 to upper limit value
•
Unsatisfactory motor torque
and speed response
•
Hunting or oscillation
C4-02 [Torque Compensation
Delay Time]
•
If torque or speed response are
slow, decrease the setting
value.
•
If hunting or oscillation occur,
increase the setting value.
200 ms
100 ms to 1000 ms
•
Torque at low speeds (10 Hz
or lower) is not sufficient.
•
Hunting or oscillation
C4-01 [Torque Compensation
Gain]
•
Increase the setting value
when torque is insufficient at
low speeds.
•
If hunting or oscillation occur
with light loads, decrease the
setting value.
1.00
0.50 - 1.50
•
Torque at low speeds (10 Hz
or lower) is not sufficient.
•
Large initial vibration at start
up.
•
E1-08 [Mid Point AVoltage]
•
E1-10 [Minimum Output
Voltage]
•
Increase the setting value
when torque is insufficient at
low speeds.
•
If there is large initial
vibration at start up, decrease
the setting value
•
E1-08: 15.0 V
•
E1-10: 9.0 V
Default s/- 5 V
Speed precision is unsatisfactory.
(V/f Control)
C3-01 [Slip Compensation Gain]
Set
E2-01 [Motor Rated Current],
E2-02 [Motor Rated Slip], and
E2-03 [Motor No-Load Current]
,
then adjust
C3-01
.
0.0 (no slip compensation)
0.5 - 1.5
Speed precision is unsatisfactory.
(Closed Loop V/f Control)
•
C5-01 [ASR Proportional Gain
1]
•
C5-02 [ASR Integral Time 1]
Adjust
C5-01, C5-02.
•
C5-01: 0.20
•
C5-02: 0.200 s
•
Proportional gain = 0.10 to
1.00
•
Integral time = 0.100 to 2.000
s
*1
The default setting changes when the setting for
o2-04 [Drive Model Selection]
changes.
*2
The default setting changes when the settings for
A1-02 [Control Method Selection] and o2-04 [Drive Model (KVA) Selection]
change.
*3
The default setting changes when the settings for
A1-02 [Control Method Selection] and E1-03 [V/f Pattern Selection]
change.
*4
Recommended settings are for 200 V class drives. Multiply the voltage by 2 for 400 V class drives.
*5
When you use Closed Loop V/f Control, ASR controls only the output frequency. You cannot make a high-gain setting as in Closed
Loop Vector.
◆
Open Loop Vector Control Method
In Open Loop Vector Control, keep
C4-01 [Torque Compensation Gain]
at its default setting (1.00).
If you cannot get speed precision during regeneration in Open Loop Vector Control, set
C3-04 = 1 [Slip
Compensation at Regen = Enabled Above 6 Hz]
.
Содержание CR700
Страница 1: ......
Страница 2: ...This Page Intentionally Blank 2 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 244: ...3 13 Test Run Checklist 244 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 422: ...7 7 Storage Guidelines 422 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 426: ...8 2 Disposal Instructions 426 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 837: ...EZZ023535 2 35 1 Revision History Revision Revised Content Date First Edition 2017 08 ...
Страница 872: ...EZZ023536 2 16 Revision History Revision Revised Content Date First Edition 2017 08 ...