





























3.10 Crane Application Setup Procedure
216
YASKAWA
SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual
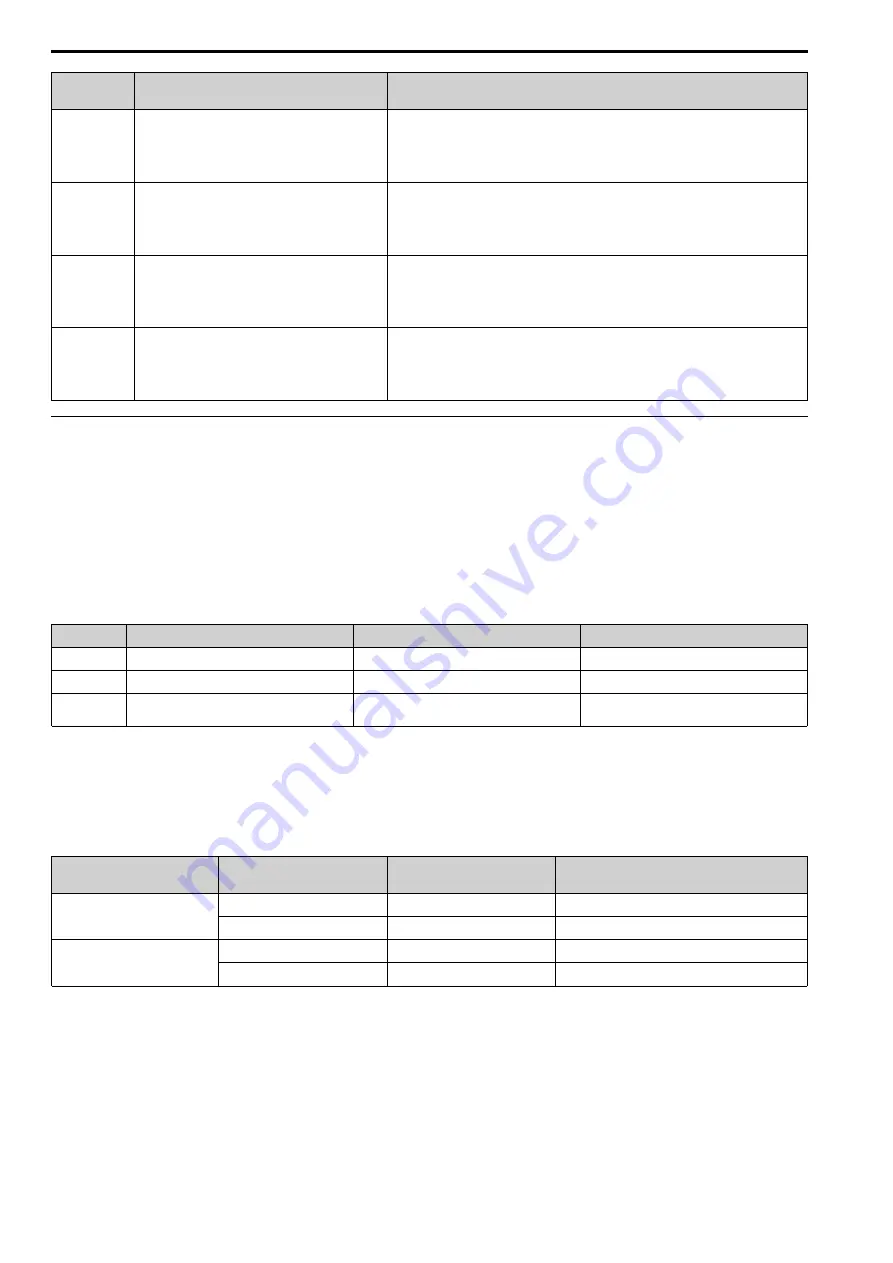
H1-xx
Setting Value
Name
Operation after Detection
31
Forward Travel Limit (N.O.)
Once the terminal switches ON during forward run, the drive switches OFF the Brake release
command (close the brake), the motor coasts to stop, and the output frequency drops to 0.
While the terminal is ON, only a Reverse run command is accepted. Once the terminal switches
OFF, both the Forward run command and the Reverse run command are accepted.
Operation does not change even if the terminal switches ON during reverse run.
32
Forward Travel Limit (N.C.)
Once the terminal switches OFF during forward run, the drive switches OFF the Brake release
command ( close the brake), the motor coasts to stop, and the output frequency drops to 0.
While the terminal is OFF, only a Reverse run command is accepted. Once the terminal switches
ON, both the Forward run command and the Reverse run command are accepted.
Operation does not change even if the terminal switches ON during reverse run.
33
Reverse Travel Limit (N.O.)
Once the terminal switches ON during reverse run, the drive switches OFF the Brake release
command (close the brake), the motor coasts to stop, and the output frequency drops to 0.
While the terminal is ON, only a Forward run command is accepted. Once the terminal switches
OFF, both the Forward run command and the Reverse run command are accepted.
Operation does not change even if the terminal switches ON during forward run.
34
Reverse Travel Limit (N.C.)
Once the terminal switches OFF during reverse run, the drive switches OFF the Brake release
command (close the brake), the motor coasts to stop, and the output frequency drops to 0.
While the terminal is OFF, only a Forward run command is accepted. Once the terminal switches
ON, both the Forward run command and the Reverse run command are accepted.
Operation does not change even if the terminal switched ON during forward run.
◆
Motor Switch Function
The drive operates by switching between 3 motors using an external input. Motor 1 and motor 2 can be used for
hoisting, raising, lowering, and traverse applications. Motor 3 can be used for traveling and slewing applications.
The drive saves the control methods, V/f patterns, and motor parameters for each of the 3 motors, and optimizes
control for each of those motors.
Note:
Some of the following functions restriction apply when switching drive operation between motors.
•
There is wait time when switching between motors. The Run command must be entered after the wait time has passed. The wait time
for switchover is 500 ms when switching between motor 1 and motor 2 if those motors use encoders. The wait time is 200 ms if using a
control method that does not require a PG encoder.
Motor
Control Method
Application
Brake Sequence
Motor 1
All
Hoisting, traversing, traveling, slewing
x
Motor 2
Other than AOLV Control
Hoisting, traversing, traveling, slewing
x
Motor 3
V/f
Traveling, slewing
Setting possible only with brake release/close
control
■
Description of Operation
Switch between motors with an ON/OFF combination of terminals set to
H1-xx = 16 [Motor 2 Selection]
and
H1-
xx = 39 [Motor 3 Selection]
.
Switch between motors with an ON/OFF combination of terminals set to
H1-xx = 16 [Motor 2 Selection]
and
H1-
xx = 39 [Motor 3 Selection]
.
H1-xx = 16
[Motor 2 Selection]
H1-xx = 39
[Motor 3 Selection]
Selected Motors
Parameters for Control Method Setting
OFF
OFF
Motor 1
Select with
A1-02
ON
Motor 3
N/A
ON
OFF
Motor 2
Select with
E3-01
ON
Motor 3
N/A
*1
If
H1-xx = 39
is set while
H1-xx = 16
is not set,
oPE03 [Multi-Function Input Setting Err]
is detected.
*2
The motor switch function is disabled when
A1-02 = 4 [Control Method Selection = Advanced Open Loop Vector]
.
*3
You cannot set the control method for motor 3. Motor 3 is enabled only when operating the drive with V/f Control.
You cannot switch between motors 1, 2, and 3 during run. The drive detects
rUn [Motor Switch during Run]
when
attempting to switch the motors during run.
Содержание CR700
Страница 1: ......
Страница 2: ...This Page Intentionally Blank 2 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 244: ...3 13 Test Run Checklist 244 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 422: ...7 7 Storage Guidelines 422 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 426: ...8 2 Disposal Instructions 426 YASKAWA SIEPC71061723A YASKAWA AC Drive CR700 Technical Manual ...
Страница 837: ...EZZ023535 2 35 1 Revision History Revision Revised Content Date First Edition 2017 08 ...
Страница 872: ...EZZ023536 2 16 Revision History Revision Revised Content Date First Edition 2017 08 ...