




























22-
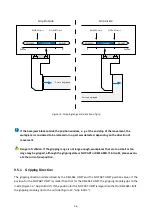
The actual direction of movement of the base jaws during GRIP and RELEASE is determined by the pa-
rameters RELEASE LIMIT and NO PART LIMIT, which are stored in the acyclic process parameters of the
gripping module (see chapter 8.2.2).
INDEX - Grip index (Bit 7...0, UIntegerT)
The grip index identifies one out of two pre-parameterized grip presets (cf. chapter 9.5and chapter
8.2.2), which is used for the execution of the next grip command.
8.1.2
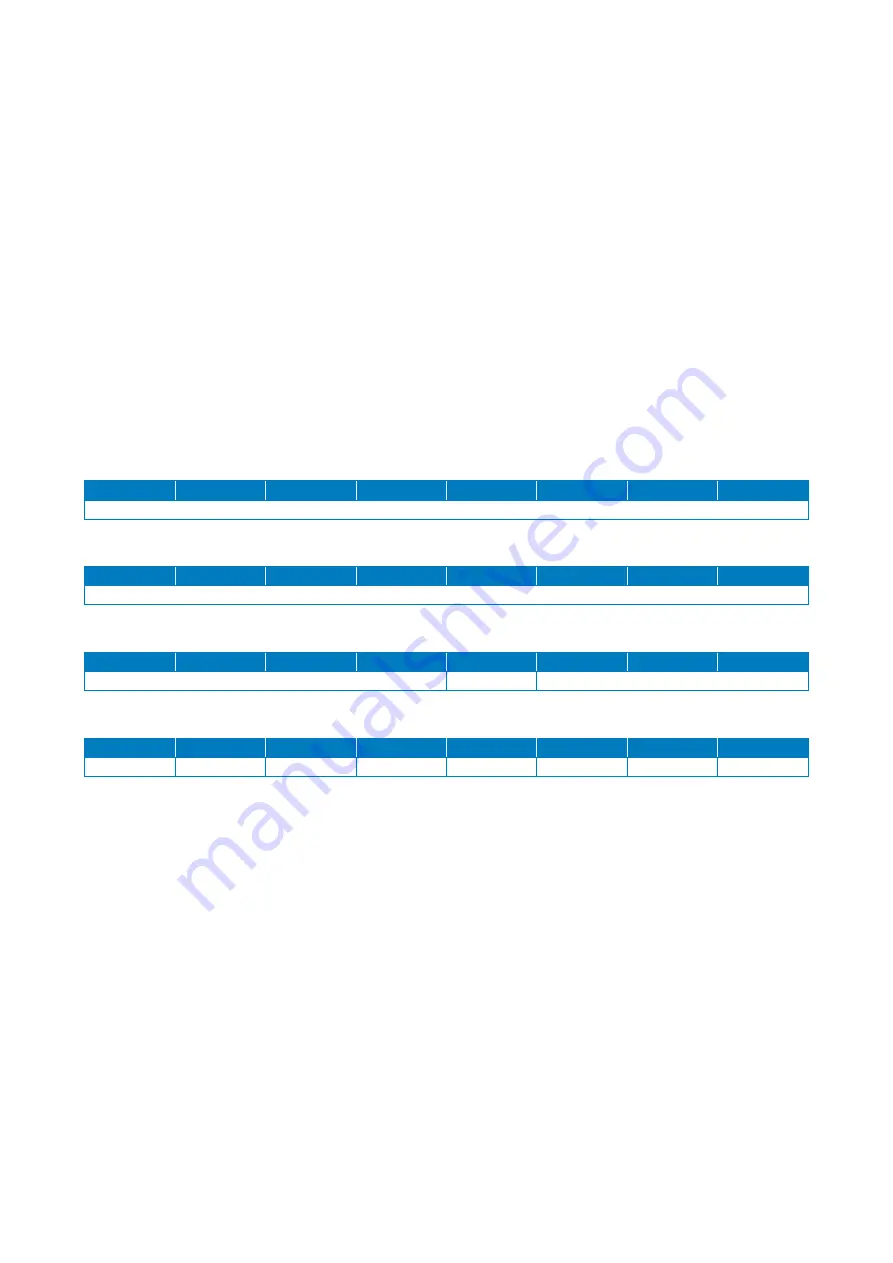
Input Data (Gripping Module to IO-Link Master)
Table 10 describes the cyclic process data word (4 bytes) that is transmitted from the gripping module to the
IO-Link master.
BYTE 0
31
30
29
28
27
26
25
24
POS
BYTE 1
23
22
21
20
19
18
17
16
POS
BYTE 2
15
14
13
12
11
10
9
8
RES
PARTLOST
RES
BYTE 3
7
6
5
4
3
2
1
0
RES
TEMPWARN TEMPFAULT
FAULT
HOLDING
NO PART
RELEASED
IDLE
Table 10: Process data word gripping module to IO-Link master
POS - Current position (Bit 31...16, IntegerT)
Returns the current position of the base jaws in 1/100 mm.
RES - reserved data bits (bit 15...12)
These data bits are reserved and are currently not used by the gripping module. Their value should be
ignored by the master.
PARTLOST
–
Lost workpiece detected (Bit 11, BooleanT)
This bit is set by the gripping module if a loss of the workpiece was detected during handling. This cor-
responds to a state transition from HOLDING to NO PART. The bit is automatically reset with the execu-
tion of the
RELEASE
command.