




























By changing the RPM in the equation above you can calculate the azimuthal resolution for any rotation speed.
RPM
Resolution
300
0.1°
600
0.2°
900
0.3°
1200
0.4°
Table 8-1 Rotation Speed vs Resolution
8.3.2 Rotation Speed Fluctuation and Point Density
Your sensor uses a feedback control function to maintain its rotational speed within ±3 RPM of its configured setting. This
small variation in speed produces a small change in the azimuthal gaps with every revolution. Consequently, over time, the
sensor automatically “fills in the gaps” between successive laser firings.
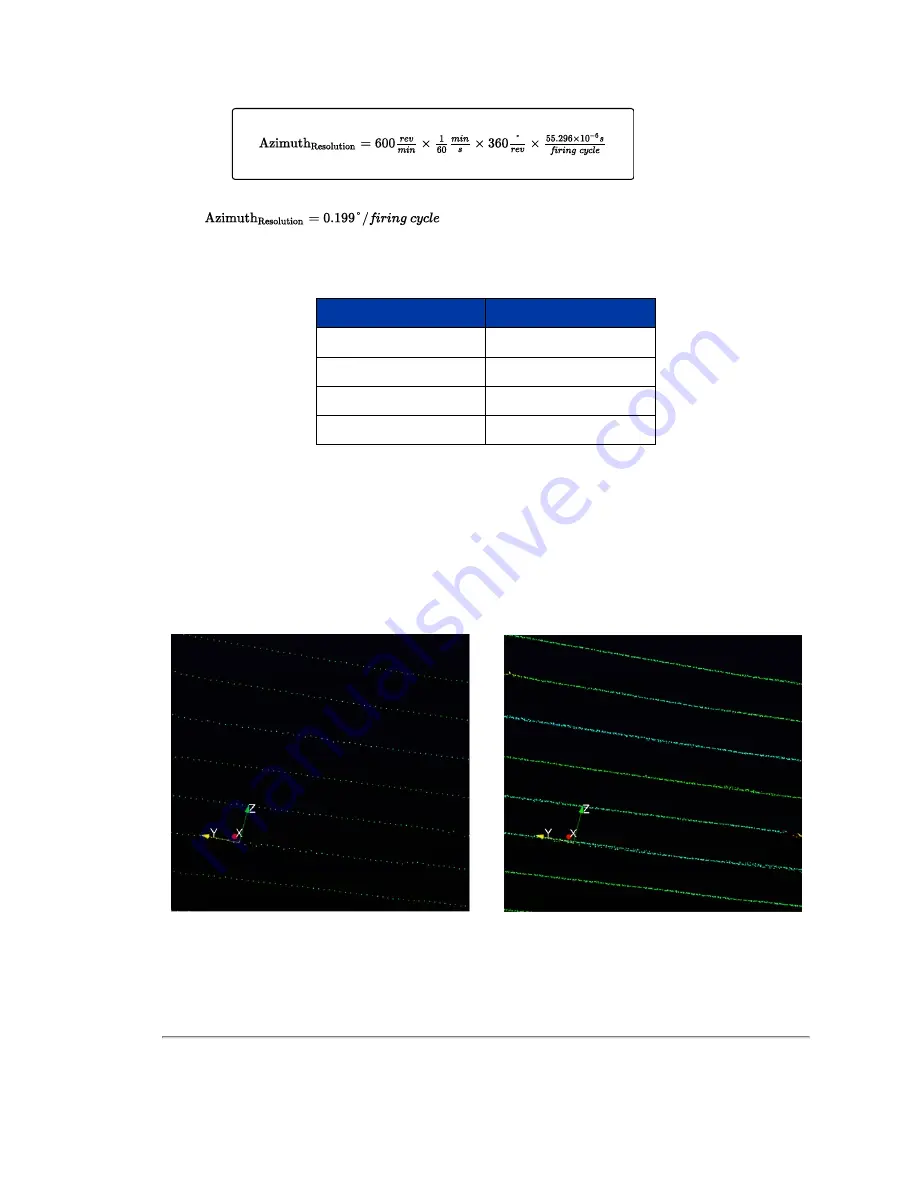
A data set from a stationary sensor provides an example of the how the sensor “fills in the gaps,” and the effect is demon-
strated in
. On the left is a single frame of data. On the right is the same frame and the nine preceding
frames overlaid on each other. You can see how the azimuth gaps are filled.
Figure 8-2 Point Density Example
Chapter 8 • Sensor Operation
51
Содержание VLP-16
Страница 1: ...VLP 16 User Manual 63 9243 Rev D ...
Страница 64: ...Figure 9 9 Single Return Mode Timing Offsets in µs 64 VLP 16 User Manual ...
Страница 86: ...http 192 168 1 201 cgi setting laser on 204 OK Sensor laser is On motor rpm is 301 86 VLP 16 User Manual ...
Страница 106: ...C 6 Puck Hi Res Optical Drawing Figure C 6 Puck Hi Res OpticalDrawing 86 0129 Rev A 106 VLP 16 User Manual ...
Страница 109: ...D 1 Interface Box Wiring Diagram Figure D 1 Interface Box Wiring Diagram 86 0107A Appendix D Wiring Diagrams 109 ...
Страница 110: ...D 2 Interface Box Schematic Figure D 2 Interface Box Schematic 69 8230A 110 VLP 16 User Manual ...