





























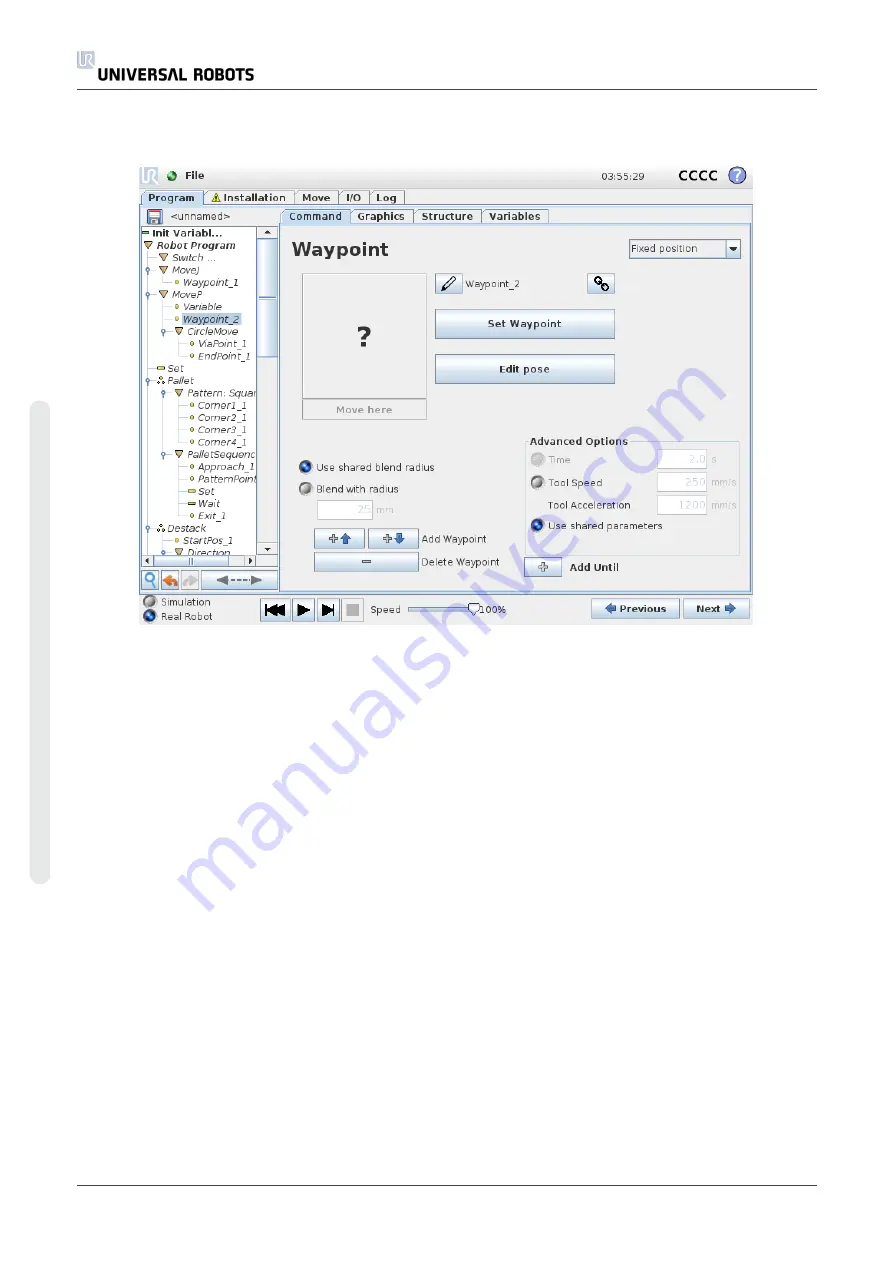
1.24.7. Command: Variable Waypoint
A waypoint with the position given by a variable, in this case calculated_pos. The variable has to
be a
pose
such as
var=p[0.5,0.0,0.0,3.14,0.0,0.0]. The first three are
x,y,z
and the last three are the orientation given
as a
rotation vector
given by the vector
rx,ry,rz
. The length of the axis is the angle to be rotated in
radians, and the vector itself gives the axis about which to rotate. The position is always given in
relation to a reference frame or coordinate system, defined by the selected feature. If a blend
radius is set on a fixed waypoint and the waypoints preceding and succeeding it are variable or if
the blend radius is set on a variable waypoint, then the blend radius will not be checked for
overlap (see
). If, when running the program, the blend radius
overlaps a point, the robot will ignore it and move to the next one.
For example, to move the robot 20
mm
along the z-axis of the tool:
var_1=p[0,0,0.02,0,0,0]
Movel
Waypoint_1 (variable position):
Use variable=var_1, Feature=Tool
1.24.8. Command: Direction
The program node
Direction
specifies a motion relative to feature axes or TCPs. The robot moves
in along the path specified by the Direction Program Node until that movement is stopped by an
Until
condition. You must have Until conditions for stopping a direction movement, tap the
Add
Until
button to define the stop criteria.
UR10
172
User Manual
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Содержание UR10/CB3
Страница 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Страница 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 68: ...Safety System Certificate UR10 60 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 69: ...TUV Rheinland User Manual 61 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 74: ...KC Registration UR10 66 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 94: ...UR10 86 User Manual Part II PolyScope Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 249: ...Software Version 3 14 User Manual 241 UR10 2 Glossary Copyright 2009 2020 by Universal Robots A S All rights reserved...







































































