























C94-M8P - User Guide
UBX-15031066 - R06
Advance Information
Getting
started
Page 9 of 29
3.3
Updating firmware on C94-M8P
Before starting evaluation, please check that the application boards are using the latest firmware. Information on
the latest firmware is published on the u-blox web site. For updating the firmware, follow the steps described in
chapter 7.1 Firmware Update u-blox 5-8 in
u-center User Guide [4].
All the changes in configuration are lost when application boards are updated. Base and Rover must be re-
configured after updating
Do not have more than one application board connected to your computer while updating
3.4
Configuration
The C94-M8P package includes two identical boards featuring u-blox NEO-M8P-2 modules. You will configure
one of the boards to act as a Base Station, and the other will operate as a Rover.
3.4.1
GNSS module configuration
The NEO-M8P-2 positioning module on the C94-M8P application board is a concurrent GNSS receiver and can
receive and track multiple GNSS systems. The NEO-M8P module is configured by default for concurrent GPS and
GLONASS reception, where both constellations will be used in an RTK solution. Other available configurations
are GPS-only and GPS+BeiDou reception. A GPS-only setup can be used if higher RTK update rate is of interest.
The default GNSS constellation is GPS+GLONASS. For most users this is the optimal configuration and no
further configuration is needed.
If the configuration is changed – the changes need to be made for both boards as Base and Rover should
use the same GNSS systems.
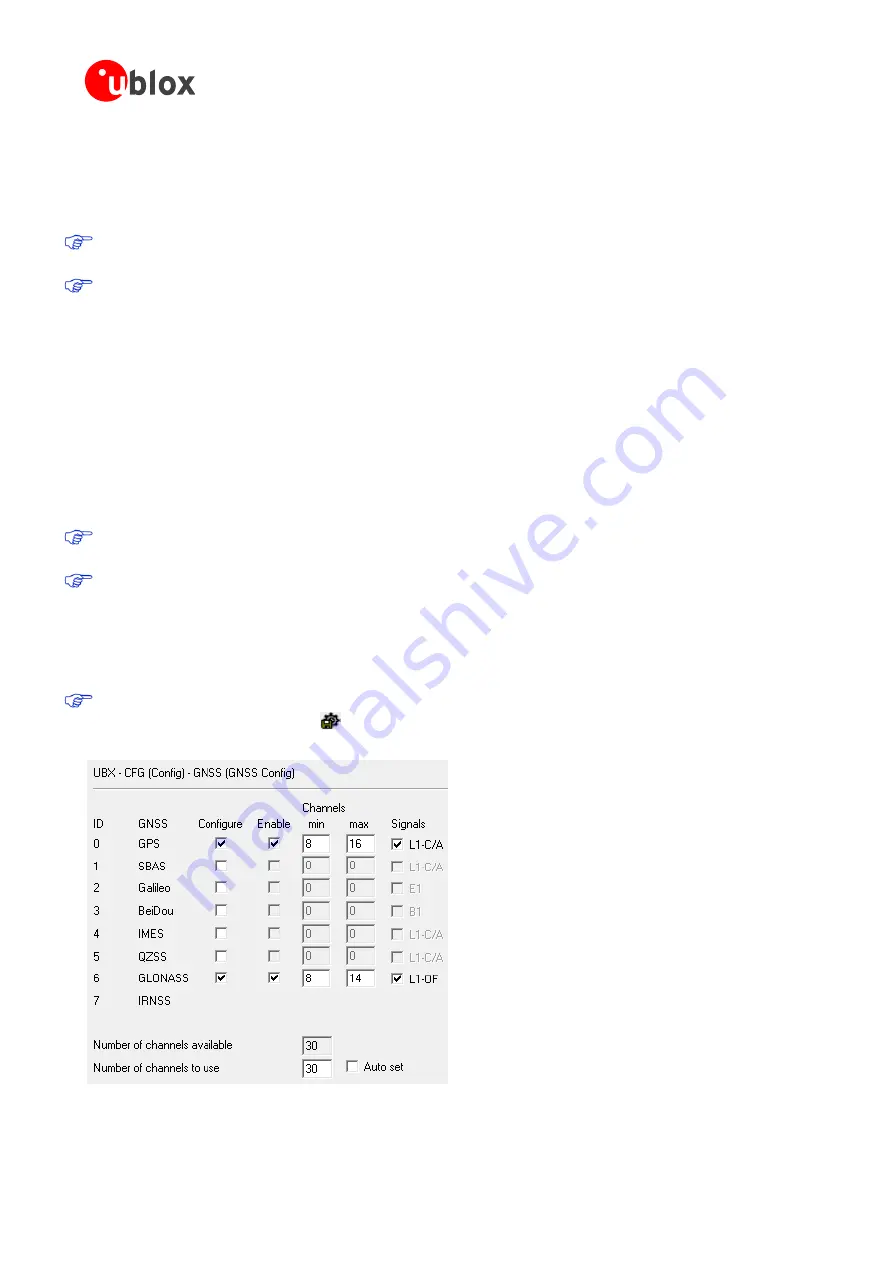
For GNSS module configuration, use the micro-A USB port to connect with a PC running u-center. Once it is
connected, configure the module on u-center (View -> Message View -> UBX-CFG-GNSS) as shown in Figure 1.
For more information, refer to the
[4], the
u-blox 8 /
u-blox M8 Receiver Description
including Protocol Specification
[1], and
Protocol Specification Addendum for HPG1.30
Always remember to store configuration changes by sending the UBX-CFG-CFG message in u-center, which
can be done with the shortcut,
.
Figure 1: Configuration of the NEO-M8P-2 GNSS module on C94-M8P application board