





























30
refer to the "Debugging Manual".
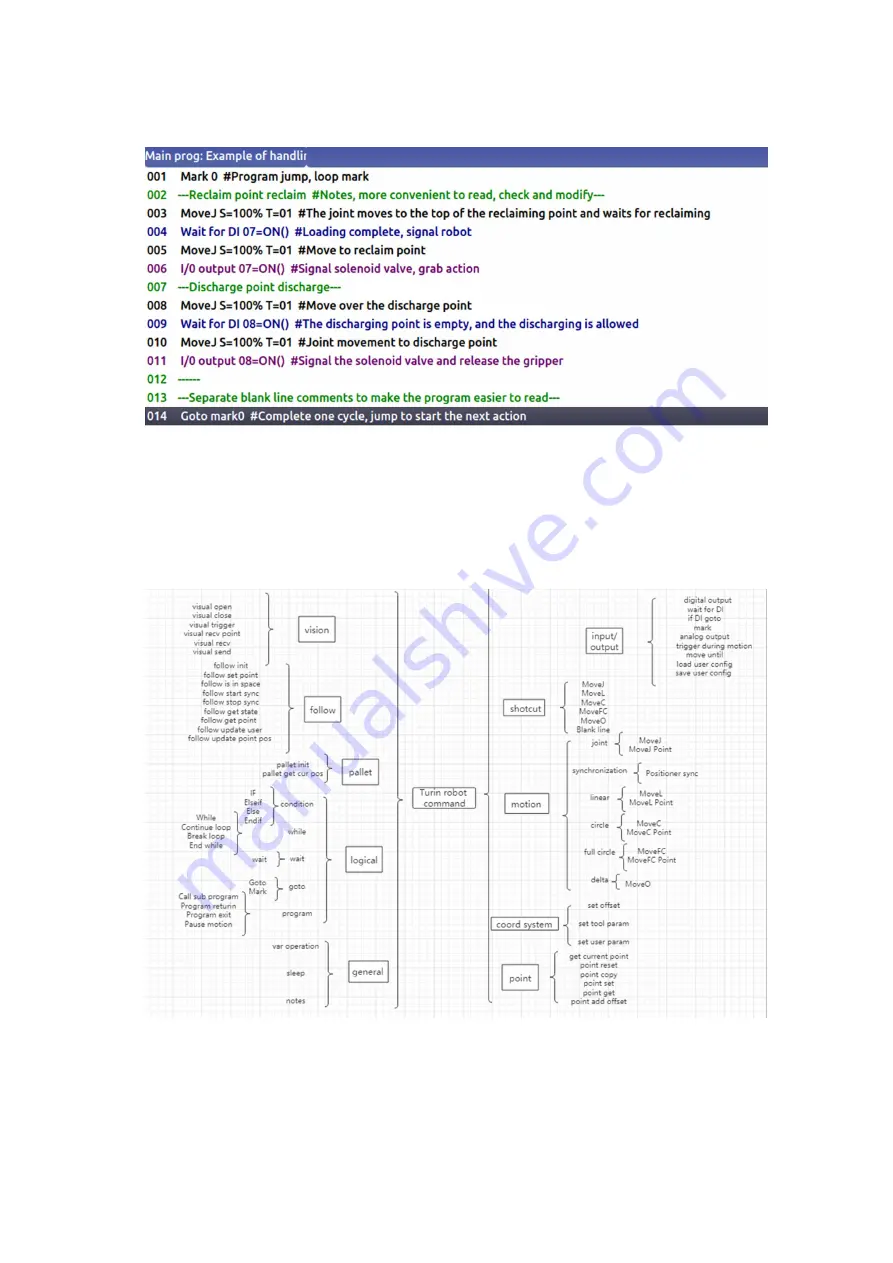
A simple program example is listed below.
Figure 3-14 Program case
3.4 Program instructions
As shown in the figure, this is a collection of program instructions on the current
teach pendant. In the following chapters, instructions will be divided into five categories
and introduced separately. (In addition to the instructions on the teach pendant, there are
background instructions, please refer to the "Debugging Manual")
Figure 3-15 Command collection
3.4.1 Motion instruction
Usually the motion command records the position data, motion type and motion
speed.
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...







































































