





























54
Example) Read the setting of the previous section.
command
reply:
ACS?0000
0000/TIM/000000/SPD/001000
Number of digits will be displayed in more than six orders of magnitude.
ACS?0001
0001/TIM/003000/SPD/008000
ACS?2001
2001/ADD/015000/SPD/008000
3. Scan preparation
Auto-change drive will not executed, even if just turn on a motor by entering the speed
change data. You need to send the preparation command for all motors that will be
executed the auto-change-drive.
4. Scan execution
Please complete the auto-change-drive preparation. And the auto-change-drive is
executed, when you execute the "ABS, REL and SCAN" related commands. When you
execute in synchronization with multiple axes, please executes the "PAUSE ON"
command at first before performing the move-related commands, and then, please enter
the synchronized axis all the moving-related commands. And please start to operate by
"PAUSE OFF" command.
(Supplement) For timing error
The change start time after detection of the change condition when moving in auto
change scan drive are below and they are different when moving in constant speed
or moving in acceleration or deceleration.
in constant speed
:
< 320
μ
s
in acceleration
:
< 160
μ
s + period of acceleration
in deceleration
:
< 160
μ
s + period of deceleration
At adjacent even axis and odd-axis (example: ch4,5), if auto-change-scan are
detected simultaneously, timing of the odd-axis is delayed 80μs from the timing of
the even-axis.
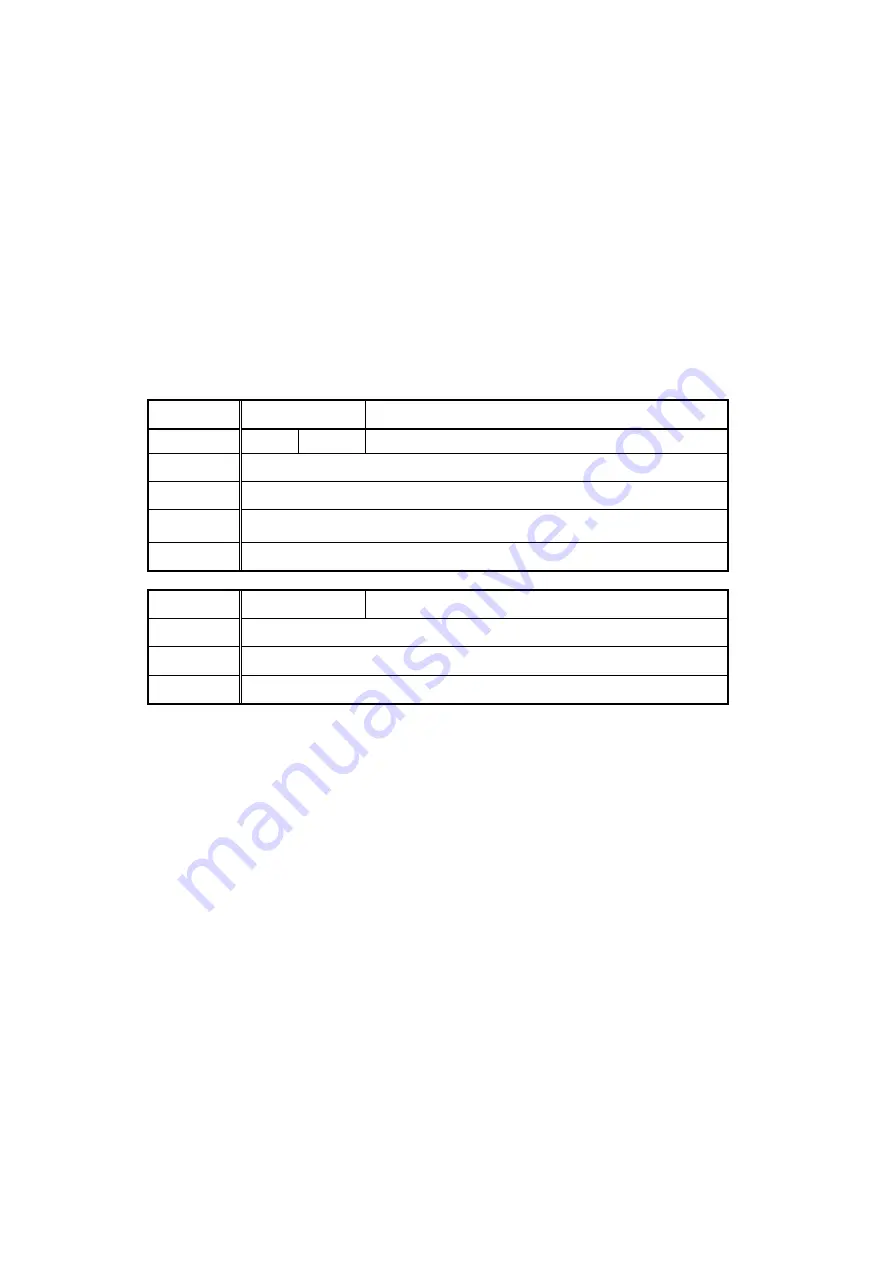
Command ACS<md><ch>
Set/Clear auto change scan ready
Argument <md>
status
P/Scan preparation C/cancel
Initial value Cancel ther p
Reply Nothing
Example ACSP00 Prepare the auto change Drive of ch0.
Remarks Only remote mode
Command ACSP?<ch>
Confirm the auto change scan is ready.
Reply ready/ Ready not ready/ Not ready
Example ACSP?2 Reply:ready ch2 auto change drive is ready.
Remarks







































































