























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
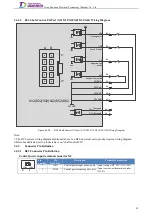
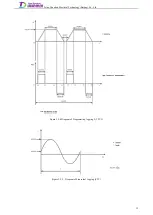
EtherCAT communication terminal connector X8~X9
Pin
number
Pin Definition
Description
Technical parameters
1
DP_PHY0_ TX+
Send data +
Standard RJ45 shielded terminal.
2
DP_PHY0_ TX-
Send data -
3
DP_PHY0_ RX+
Receive data +
4
——
——
5
——
——
6
DP_PHY0_ RX-
Receive data -
7
——
——
8
——
——
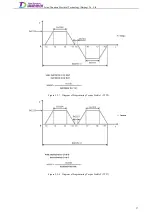
Serial port debugging terminal connector X10
Pin
number
Pin Definition
Description
Technical parameters
1
NC
Suspended and unconnected
——
2
RS485+
RS485
——
3
RS485-
RS485 signal-
——
4
NC
Suspended and unconnected
——
5
NC
Suspended and unconnected
——
6
GND
Signal ground
——
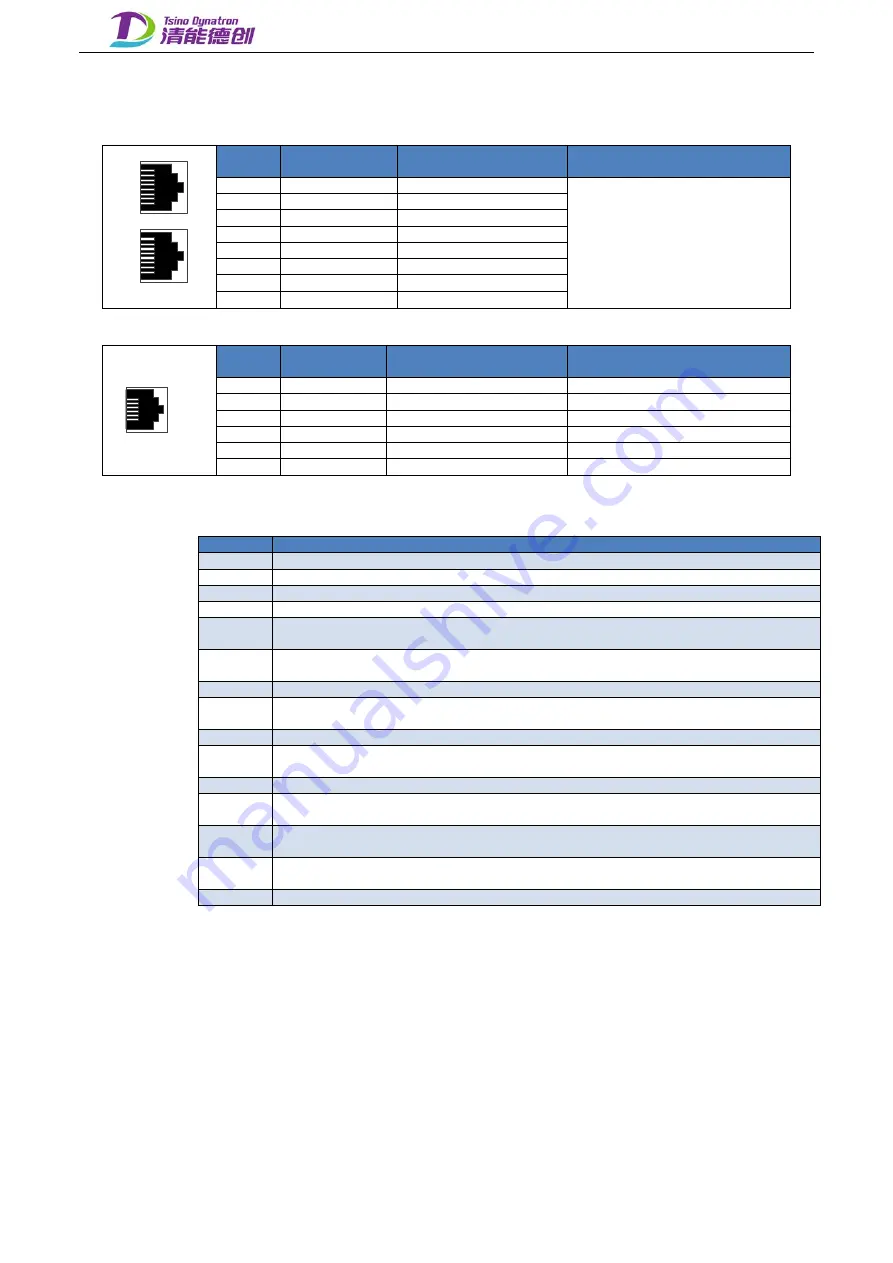
Inspection After Installation
3.5
Number
Inspection item
1
Make sure the installation position and direction are according to the engineering requirements
2
Check the product for any damage, and make sure there is no detached accessory
3
Make sure all screws are properly tightened
4
Check the cable for any damage, break and joint
5
Make sure the cable plug is clean and free of damage, the connection is correct and reliable, and
the cored wire is firmly clamped
6
Make sure the cables are wired uncrossed with allowance at the turning points, away from sharp
parts of the machine and free from extrusion
7
Make sure both ends of the cable are identified properly, clearly and neatly
8
The dynamic line and ground wire should be made of a whole piece of copper core without joint
and cable sheath damage
9
Make sure the dynamic line and ground wire are properly and reliably connected for good contact
10
Make sure the wire diameters of the dynamic line and ground wire are meet the engineering
documents as well as meet the distribution requirements
11
Make sure the dynamic line, ground wire and signal line are wired separately
12
Make sure the dynamic line and ground wire are routed straightly, strapped neatly with
appropriate allowance at the turning points
13
Make sure the dynamic line, ground wire and power distribution switch are identified properly,
clearly and neatly
14
Make sure the dynamic output phase sequence of the motor module is consistent with the phase
sequence of the motor
15
Make sure the encoder feedback cable is properly shielded
1
6
8
1
8
1
28
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
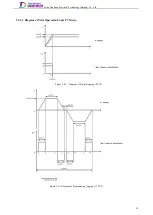
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































