





Timpdon Marine
Tel 0161 - 980 8054
Issue 1 – May 2011
Web
www.timpdon.co.uk
EMail [email protected]
Principles of Operation
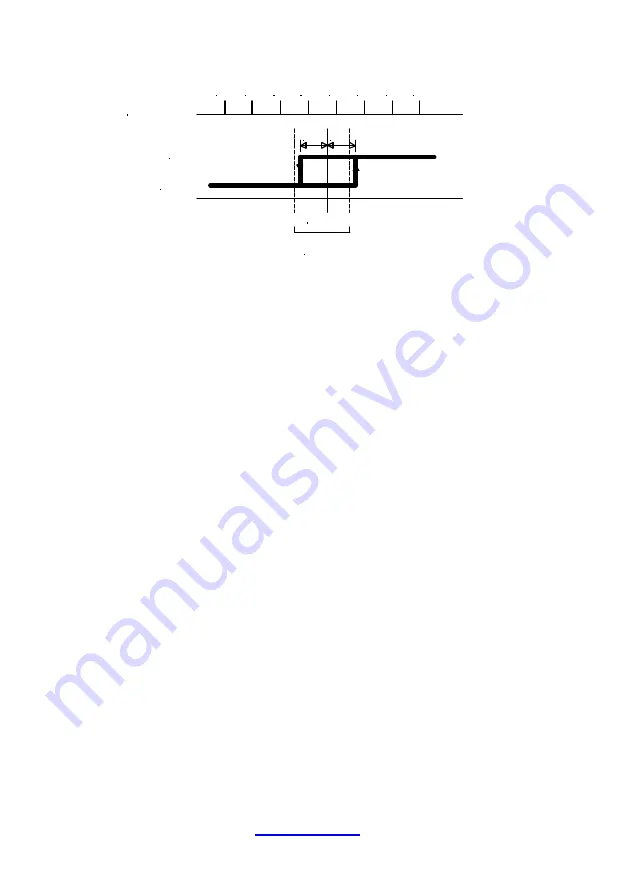
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
RC Pulse
Width in ms
Set
Reset
Auto-Zero
Limits of
Auto-Zero
0.2 ms 0.2 ms
1
In a standard RC system, the output from each receiver channel is a
variable width pulse, nominally between 1.0 ms and 2.0 ms in width,
repeated at intervals of approximately 20 ms. A pulse width of 1.0 ms
corresponds to the transmitter joystick at
minimum
, 2.0 ms to
maximum
and 1.5 ms to
centre
.
2
Within the
MRSS1
, the servo output is limited to one of two actions,
depending on the setting of the transmitter joystick:
Joystick
Action
Maximum
Rotate to programmed
set
position
Minimum
Rotate to programmed
reset
position
The rotation rate of the servo, at all times, is constant.
3
The servo output pulse widths corresponding to the
maximum
and
minimum
joystick positions [
set
and
reset
] are user programmable,
as is the
rotation rate
of the servo between these positions. The
available range of servo output pulse widths is 0.6 ms to 2.4 ms.
4
On power up, provided that the transmitter is on, the
MRSS1
will auto
zero within an input pulse width range of 1.3 to 1.7 ms. The
maximum
and
minimum
switch levels will then be set at +/- 0.2 ms around the
auto zero position. The last valid auto zero setting is retained in non-
volatile memory.
If the transmitter is off at power up, or the pulse widths are outside the
permitted limits for auto zero, the unit will retain the last valid auto
zero level, if available, or set the zero position to 1.5 ms, if not.





















































