






















6
THE LEVER
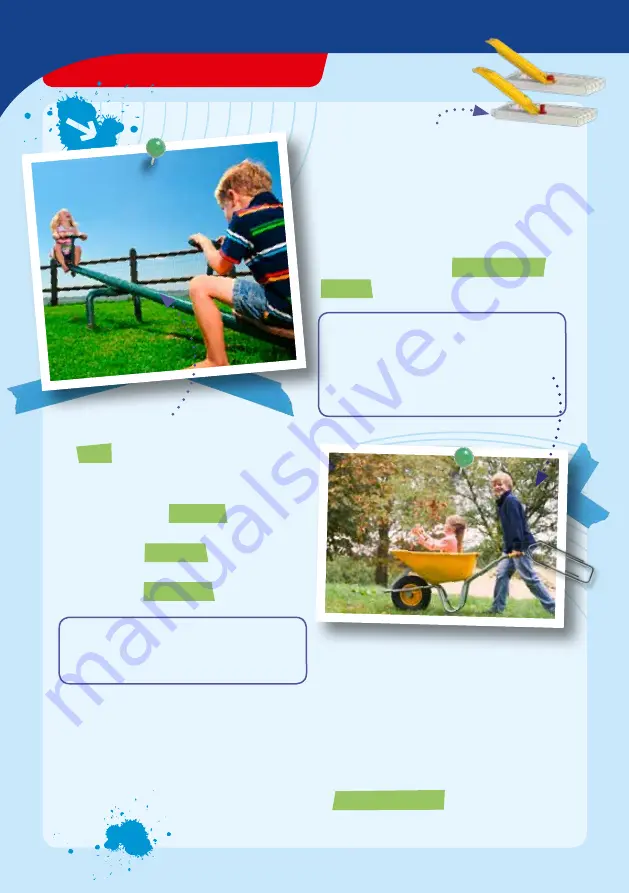
A lever is a simple machine used to
raise or move an object; it consists of
a rigid beam that can pivot on a fixed
point, called the fulcrum. The side on
which the load to be moved is located
is called the load arm. The other side,
on which the moving force is applied,
is called the force arm.
These tools and toys take advantage
of the fact that you can generate a
great force by exercising a small force
if you move farther away to do so.
THE ANCHOR PIN LEVER
The anchor pin lever in your
experiment kit also uses a lever
like this so that you can take the
components apart more easily. The
pivot point is between the two lever
arms, so we call it a “double-sided
lever.”
In this case, the wheel of the
wheelbarrow is the pivot (fulcrum)
of the lever. The two lever arms
constitute the distance to the center
of gravity of the load and the distance
to the hold point of the wheelbarrow.
Because both lever arms are on the
same side, this type of lever is called
a “one-sided lever.” But the principle is
the same as with the anchor pin lever!
››› Everyday examples include
seesaws, crowbars, and wrenches.
››› A wheelbarrow uses a different
kind of leverage to reduce the
amount of force needed to lift
a load.
› › › CHECK IT OUT
Содержание Alien Robots
Страница 10: ...8 1 2 3 4 5 6 7 12 12 19 11 11 x4 x5 ALIEN SNAKE BOT ...
Страница 11: ...9 Alien Robots 8 9 10 11 12 11 11 11 11 ALIEN SNAKE BOT ...
Страница 12: ...10 C 13 14 15 16 11 11 ALIEN SNAKE BOT ...
Страница 13: ...11 Alien Robots A B B part mark position Done B A x2 17 19 20 18 21 ALIEN SNAKE BOT B B A A B ...
Страница 16: ...14 Note This part is angled differently than the others Done 8 9 10 11 11 A A B INSECTOID BOT INSECTOID ...
Страница 20: ...18 OK 14 15 B Hole B A B A 14 15 16 Done B B Hole B A ROLLING DRAGON BOT B A A ...
Страница 21: ...19 GRABBER CLAW 11 12 12 100mm axle 30mm axle 1 2 3 5 6 7 8 4 11 12 12 18 19 Alien Robots ...
Страница 22: ...20 GRABBER CLAW B B Top view 9 10 11 12 13 A B x2 x2 B A ...
Страница 24: ...22 1 2 3 4 5 6 12 11 11 11 11 ALIEN RAPTOR ...
Страница 25: ...23 Alien Robots A A 12 11 A A A B B B x2 x2 7 8 9 10 11 12 ALIEN RAPTOR B A ...
Страница 28: ...26 B B 6 ROVING DINO BOT 8 9 Hole B 7 8 9 Hole B 11 12 11 11 6 11 11 12 11 8 Hole B 11 7 8 9 ...
Страница 31: ...29 PLAYGROUND SWING C 1 2 3 4 5 12 11 11 12 20 Alien Robots ...
Страница 35: ...33 8 9 Done A A A B B B BIPEDAL ROBOT 10 Alien Robots ...
Страница 36: ...34 1 2 3 4 6 5 x2 11 11 12 12 11 PUMPJACK ...
Страница 37: ...35 Alien Robots C B A 11 A B 7 8 9 10 Done PUMPJACK 11 ...
Страница 38: ...1 2 3 4 5 11 11 11 11 11 ALIEN FROG BOT 36 ...
Страница 39: ...37 Side view Side view 6 7 8 9 19 20 ALIEN FROG BOT B B Alien Robots ...
Страница 40: ...38 B Side view Side view B B 10 11 12 13 11 12 A A A A B B ALIEN FROG BOT ...
Страница 41: ...39 Alien Robots ALIEN FROG BOT B Side view Side view 14 15 16 12 Done A A B B 17 ...
Страница 44: ...555062 03 090119 ...







































































