





























16.3 CAN Network and Module
The controller area network (CAN) uses a serial multimaster communication protocol that efficiently supports
distributed real-time control, with a high level of reliability, and a communication rate of up to 1 Mbps. The CAN
bus is ideal for applications operating in electrically noisy environments, such as in the automotive and other
industrial fields that require reliable communication.
Prioritized messages of up to eight bytes in data length can be sent on a multimaster serial bus using an
arbitration protocol and an error-detection mechanism for a high level of data integrity.
16.3.1 CAN Protocol Overview
The CAN protocol supports four different frame types for communication:
• Data frames that carry data from a transmitter node to the receiver node(s).
• Remote frames that are transmitted by a node to request the transmission of a data frame with the same
identifier.
• Error frames that are transmitted by any node upon detecting an error condition.
• Overload frames that provide an extra delay between the preceding and the succeeding data frames or
remote frames.
In addition, CAN specification version 2.0B defines two different formats that differ in the length of the identifier
field: standard frames with an 11-bit identifier and extended frames with 29-bit identifier.
CAN standard data frames contain from 44 to 108 bits and CAN extended data frames contain 64 to 128 bits.
Furthermore, up to 23 stuff bits can be inserted in a standard data frame, and up to 28 stuff bits in an extended
data frame, depending on the data-stream coding. The overall maximum data frame length is then 131 bits for a
standard frame and 156 bits for an extended frame.
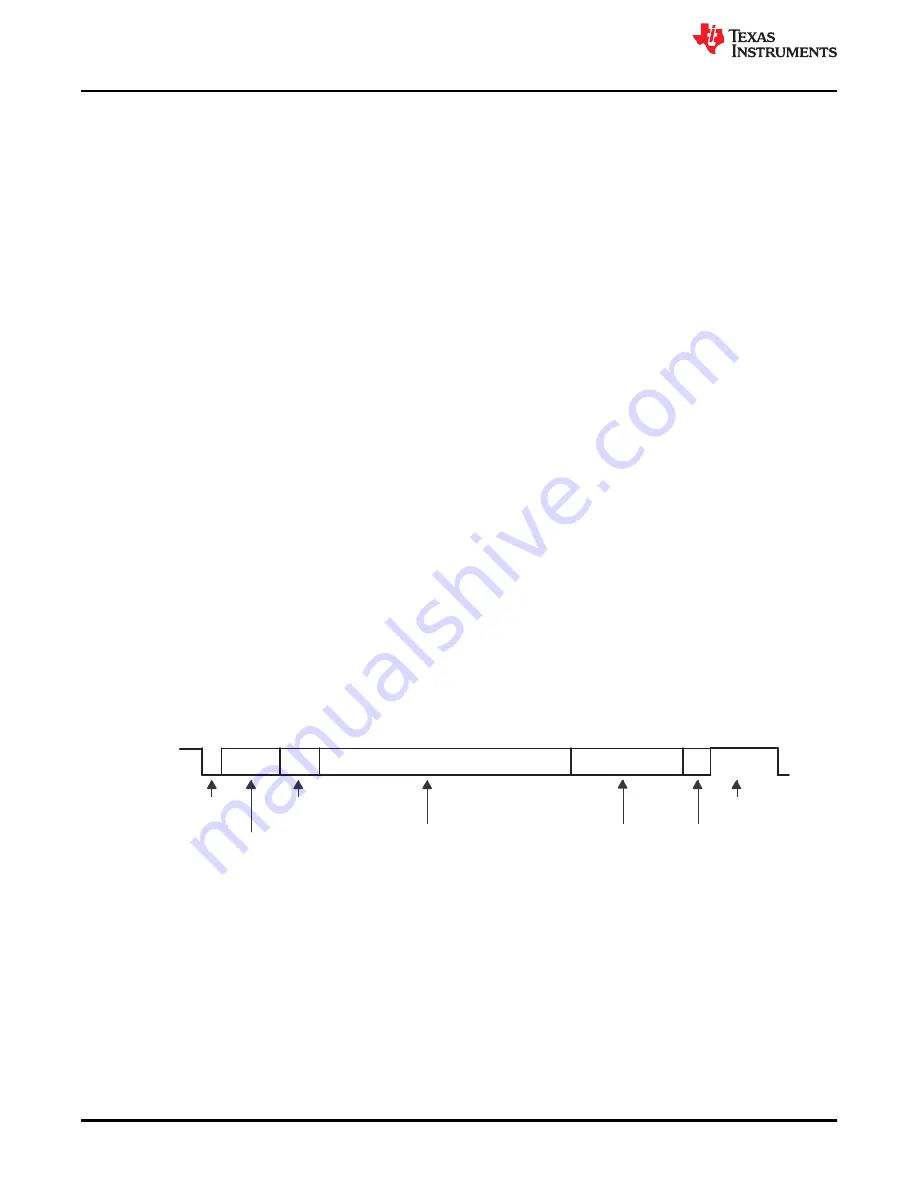
The bit fields that make up standard or extended data frames, along with their position as shown in
include the following:
• Start of frame
• Arbitration field containing the identifier and the type of message being sent
• Control field indicating the number of bytes being transmitted.
• Up to 8 bytes of data
• Cyclic redundancy check (CRC)
• Acknowledgment
• End-of-frame bits
Bit length
1
12 or 32
Start bit
Arbitration field which contains:
6
0-8 bytes
Data field
Control bits
16
CRC bits
7
End
2
Acknowledge
– 11-bit iden RTR bit for standard frame format
– 29-bit iden SRR bit + IDE bit + RTR bit for extended frame format
Where: RTR = Remote Transmission Request
SRR = Substitute Remote Request
IDE = Identifier Extension
Note:
Unless otherwise noted, numbers are amount of bits in field.
Figure 16-2. CAN Data Frame
Controller Area Network (CAN)
1002
TMS320x2806x Microcontrollers
SPRUH18I – JANUARY 2011 – REVISED JUNE 2022
Copyright © 2022 Texas Instruments Incorporated
Содержание TMS320 2806 Series
Страница 2: ......






































































