





























Table 19-1. Controller Area Network Signals (128TQFP) (continued)
Description
Buffer Type
Pin Type
Pin Mux / Pin
Assignment
Pin Number
Pin Name
CAN module 0 transmit.
TTL
O
PA1 (7)
34
CAN0Tx
CAN module 1 receive.
TTL
I
PB0 (7)
95
CAN1Rx
CAN module 1 transmit.
TTL
O
PB1 (7)
96
CAN1Tx
19.3
Functional Description
The TM4C1294NCPDT CAN controller conforms to the CAN protocol version 2.0 (parts A and B).
Message transfers that include data, remote, error, and overload frames with an 11-bit identifier
(standard) or a 29-bit identifier (extended) are supported. Transfer rates can be programmed up to
1 Mbps.
The CAN module consists of three major parts:
■ CAN protocol controller and message handler
■ Message memory
■ CAN register interface
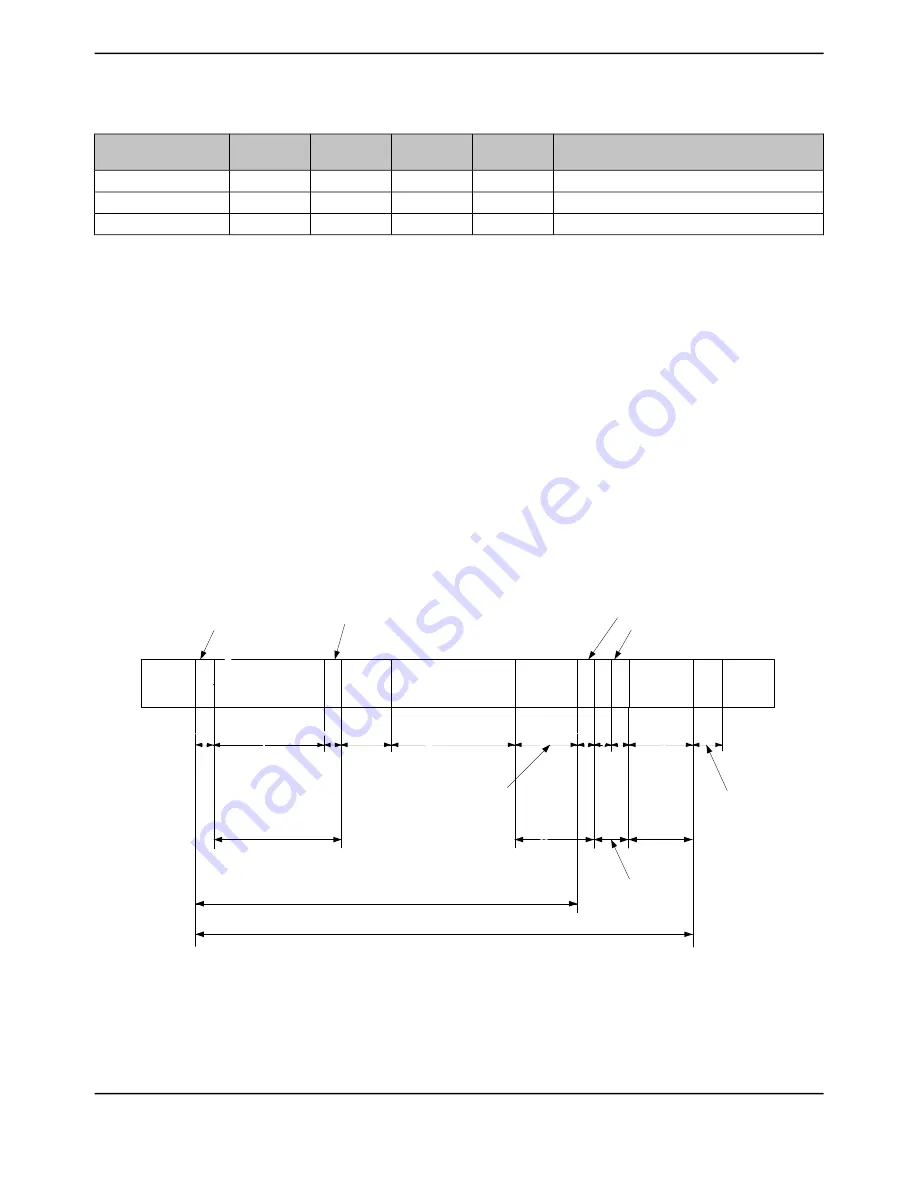
A data frame contains data for transmission, whereas a remote frame contains no data and is used
to request the transmission of a specific message object. The CAN data/remote frame is constructed
as shown in Figure 19-2.
Figure 19-2. CAN Data/Remote Frame
Number
Of Bits
S
O
F
EOP
IFS
Bus
Idle
1
1
6
1
11 or 29
0 . . . 64
15
7
3
1 1
A
C
K
Data Field
Control
Field
R
T
R
Message Delimiter
Bus
Idle
Bit Stuffing
CAN Data Frame
Arbitration Field
CRC Sequence
CRC
Field
Acknowledgement
Field
End of
Frame
Field
Interframe
Field
Start
Of Frame
Remote
Transmission
Request
Delimiter
Bits
CRC
Sequence
The protocol controller transfers and receives the serial data from the CAN bus and passes the data
on to the message handler. The message handler then loads this information into the appropriate
message object based on the current filtering and identifiers in the message object memory. The
message handler is also responsible for generating interrupts based on events on the CAN bus.
June 18, 2014
1358
Texas Instruments-Production Data
Controller Area Network (CAN) Module







































































