





























Stellaris® Stepper Motor RDK User’s Manual
November 4, 2009
17
6
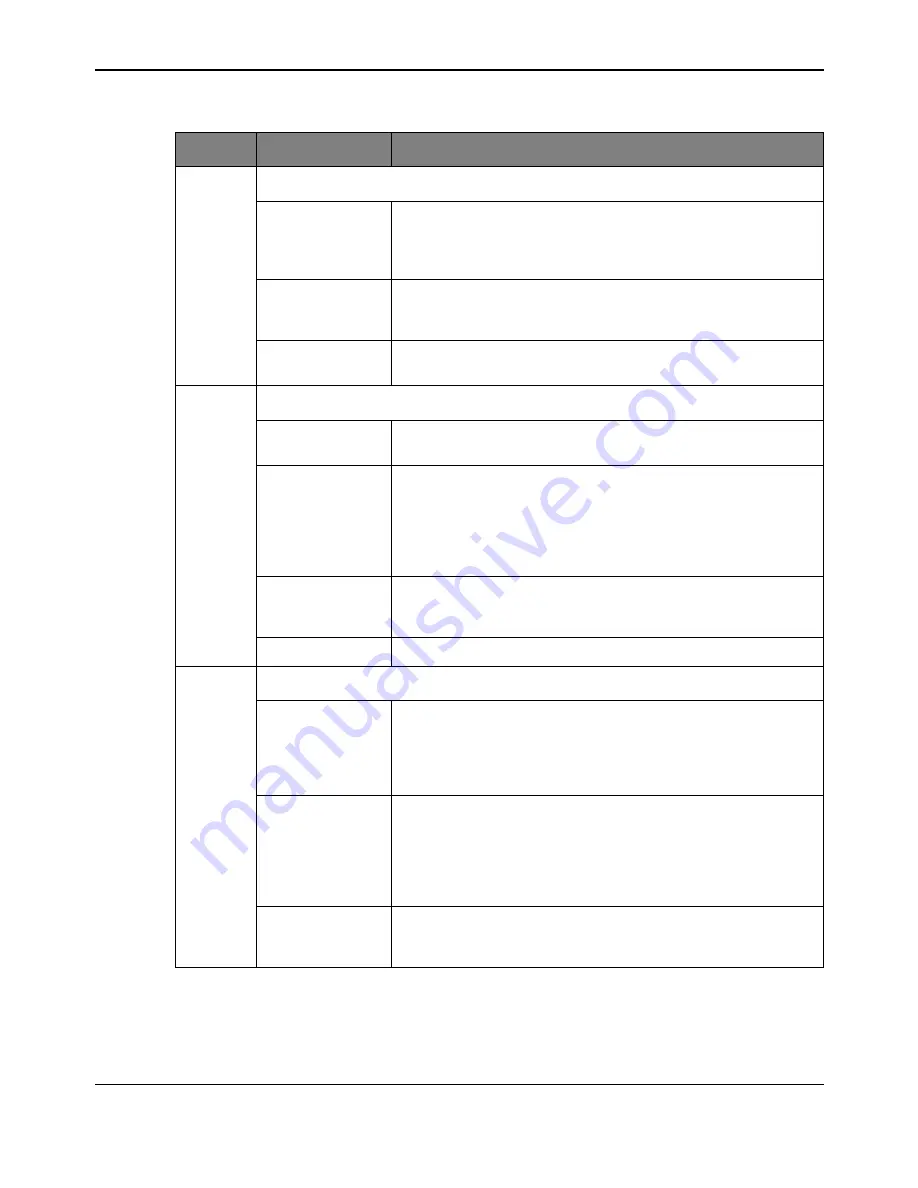
GUI Main Window Buttons
Run button
Enables the stepper motor for running. The stepper motor must be
enabled before it can be used. The motor does not move immediately
when the Run button is pressed. It only moves after the position
control is used to set a new position.
Stop button
Stops the motor. If the motor is running, the motor decelerates to a
stop. Once the Stop button has been clicked, the Run button must be
clicked before the motor will operate again.
Configure button
Opens the Configuration window. The Configuration window is
described in more detail in “Configuration Window” on page 18.
7
Statistics Area
DC Bus Voltage
Shows the voltage supplied to the motor, as measured by the
microcontroller.
Motor Current
Shows the peak current of the two windings, averaged together. This
value is sampled when the windings are switched on. The current
during the time when the windings are switched off is not measured,
and that is not reflected in the measurement. The motor current is not
available if PWM mode is used, and the current indicator will be
grayed out.
Processor Usage
Indicates the microcontroller CPU load by percentage. Useful for
estimating the loading of different applications and motor control
algorithms.
Temperature
Indicates the internal temperature sensor of the microcontroller.
8
Special Indicator Area
COM Port
Displays the COM port number, and status. If the indicator is shown in
black, and displays a number for the COM port, then the serial port is
opened. If the indicator is shown in red, and displays Err, then no
COM port is opened. The COM port selection dialog box can be
opened by double clicking on the COM port indicator.
Target
Displays the status of the target connection. If the Target is shown in
black, and indicates Stepper, then the program is communicating with
the RDK via the USB/serial port. If the indicator is shown in red, then
there was a problem communicating with the target. Communication
with the target can be restarted by double-clicking on the Target
indicator.
Fault
Indicates that an overcurrent fault has occurred. Otherwise, the
control is not visible. To clear the fault condition, double-click on the
Fault indicator.
Table 2-1. Description of GUI Main Window Controls (Continued)
Item No.
Name
Description
Содержание Stellaris
Страница 6: ...6 November 4 2009 ...
Страница 8: ...8 November 4 2009 ...
Страница 32: ...32 November 4 2009 ...
Страница 40: ...Power Supplies and USB ...
Страница 44: ...44 November 4 2009 ...