

























We recommend to check the motor datasheet for stall torque and load the motor below the stall torque specified
in the datasheet. If the load torque is still within the stall torque, we recommend to increase the Lock_ILIMIT in
the Control Configuration – Control Fault settings in the All tuning Settings page.
3.6.5 Hardware lock Current Limit [HW_LOCK_LIMIT]
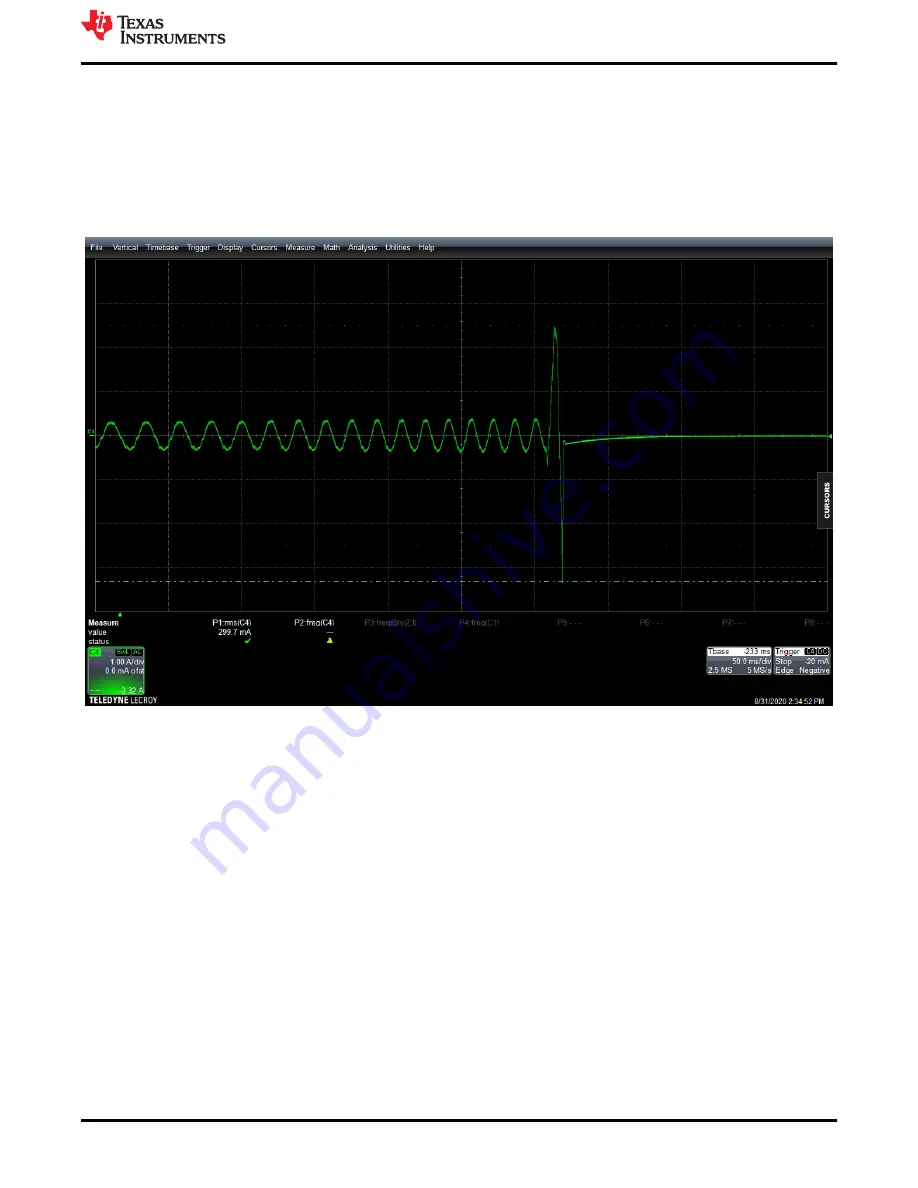
This fault gets triggered when there is a spike in the phase current due to short circuit as shown in
.
Short circuit can be due to phase to phase, phase to GND or Vm to GND short. Another reason to trigger this
fault could be incorrect speed loop and current loop PI controller gains.
Figure 3-5. Phase Current Waveform Showing a Spike due to Short Circuit
Step 1: Program Speed loop Kp [SPD_LOOP_KP], Speed loop Ki [SPD_LOOP_KI], current loop Kp
[CURR_LOOP_KP] and current loop Ki [CURR_LOOP_KI] to zero. This enables auto calculation of speed loop
and current loop PI controller gains.
Step 2: Increase the MCC Dead time [MCC_DEAD_TIME] and retry again.
Step 3: If the fault still persists, check the continuity across phase to phase, phase to GND or Vm to GND to
make sure there is no short across these terminals.
3.6.6 No Motor Fault [NO_MTR]
This fault gets triggered when the phase current is below No motor lock threshold % of base current.
Step 1: Make sure the motor phases are connected to J5 or TP9, TP10, or TP11.
Step 2: If the fault persists, set the No-Motor lock current threshold [NO_MTR_THR] to 0.05A.
Essential Controls
SLLU335A – AUGUST 2021 – REVISED JANUARY 2022
MCF8316A Tuning Guide
11
Copyright © 2022 Texas Instruments Incorporated







































































