























Time
Base
A
c
c
e
l
R
a
te
Pulses Per Second
The Windows Application
35
SLVU574B – September 2011 – Revised July 2019
Copyright © 2011–2019, Texas Instruments Incorporated
DRV8803/04/05/06 Evaluation Module
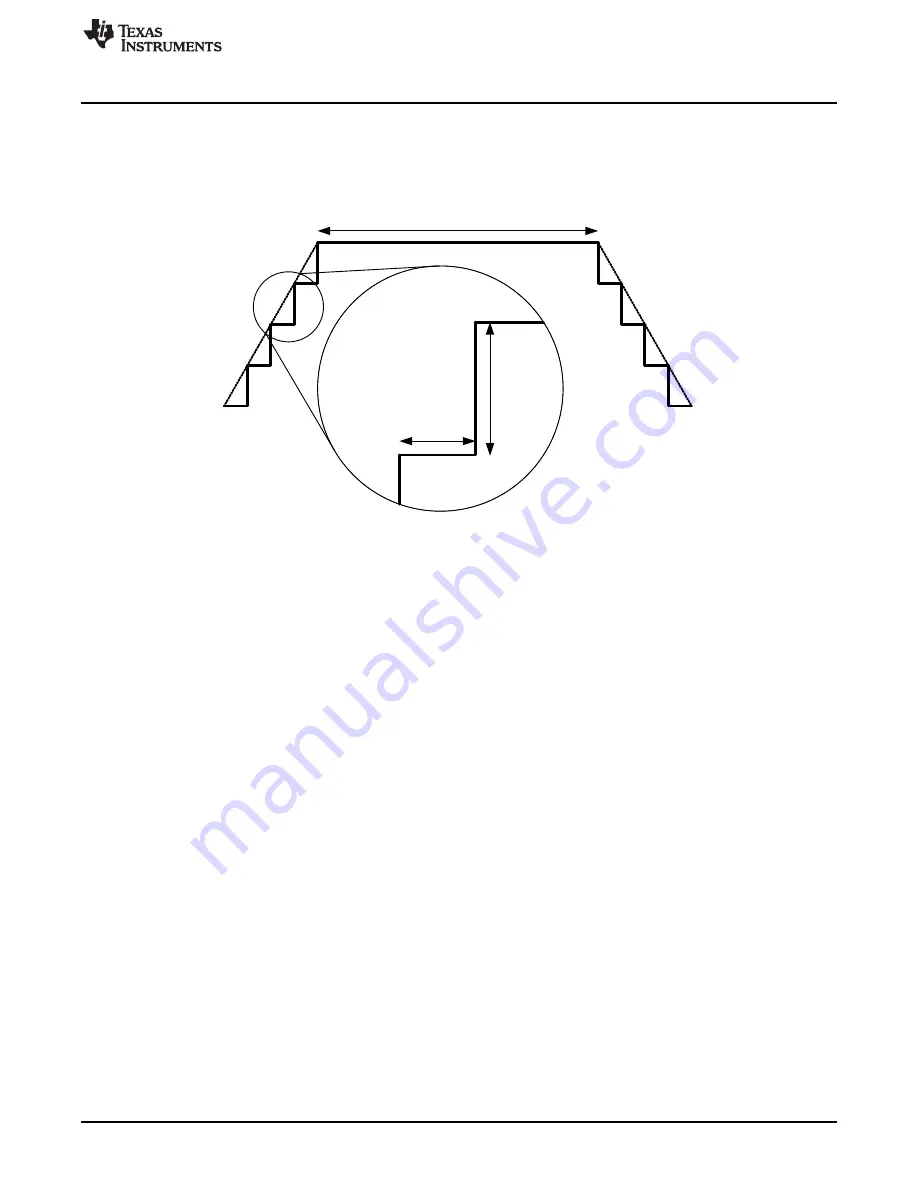
When the motor starts, the controller will accelerate the motor in order to reach the Steps Per Second
speed (see Speed Control). Acceleration Rate is an 8 bit number (0 to 255) that gets added to the current
Pulses Per Second speed and Time Base is an 8 bit number (0 to 255) that specifies how many
milliseconds will elapse from one speed increase to the next. Once the specified Pulses Per Second has
been achieved, the acceleration stops.
Figure 41. Acceleration Control
Same as described before but inversed, happens when the motor is commanded to stop.
Acceleration profile automatically updates when either slide bar or number box is changed.
4.11 Diagnostic Output
The DRV8806 will return data on every SPI transaction. This data contains valuable information as to
whether each output was subjected to a fault or not. If a fault was present, the logic state is the SPI data
packet is HI (green), whereas no fault present are represented by LO (red).
Faults generated on a per output basis could be caused by an open load or by over current. User must
refer to the device’s datasheet for more details on how the fault scheme operates.
4.12 Controlling the EVM Using External Signals
If the user wishes to run the IC using their own external signals/MCU, this can be achieved easily. The
only thing the user needs to do is powered down the MCU using the jumper JP4 labeled MCU_PWR on
the EVM. This removes the power to the MCU and allows the user to control the input signals using the
header J12. The silkscreen can be used to identify the various signals. The resistors R12-18 are meant to
protect the MCU from 5V signals (if applied) to the input pins. The user can de-solder them for better
performance. Please note that once these resistors are de-soldered, the user cannot use the on-board
MCU.
5
Schematics
Schematics for the DRV8803/04/05/06 can be found on the following pages.







































































