





























April
2018
Pathfinder DVL Guide
Page 34
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pitch & Roll
The distance to the bottom of a transmitted pulse for a given beam is a function of the angle of the beam
to the vertical. As the vehicle pitches and rolls, this angle can be different for the four beams. Some
beams will have further to travel and others will have less. The bottom slope has similar effects. The
transmitted energy density of the bottom track pulse is attenuated as it travels through the water col-
umn and the further it has to travel, the smaller the energy that is left for detection. As a result, the
altitude capability of a DVL may be reduced by the effects of bottom slope, pitch, and roll.
Transmit Power
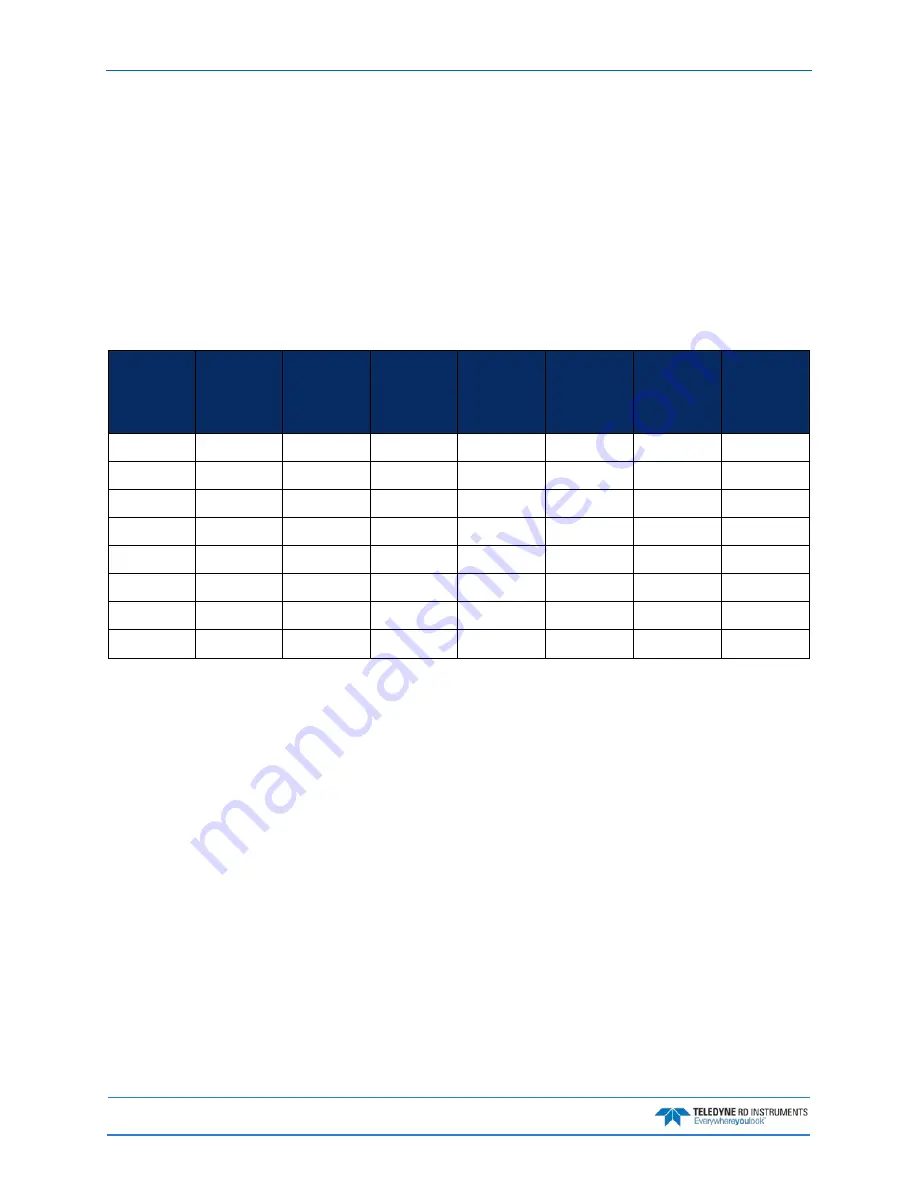
The altitude capability of a DVL will vary as the input voltage to the system varies. Table 9 below gives an
approximation of the range versus battery voltage.
Table 9.
Pathfinder Nominal Voltage versus Bottom Tracking Range with Ethernet
Vin
V
Idle
current
mA
Idle
Power
W
Peak
Current
mA
Peak
Power
W
Average
Power
W
(estimate)
XMIT
Power
W/Beam
BT Range
(m)
10
170
1.70
445
4.45
1.95
0.16
74
12
144
1.73
498
5.98
2.11
0.29
77
16
108
1.73
576
9.22
2.40
0.63
82
20
88
1.76
618
12.36
2.71
1.6
86
24
74
1.78
664
15.94
3.05
1.8
89
30
64
1.92
750
22.50
3.77
2.9
92
32
62
1.98
785
25.12
4.07
3.3
93
36
58
2.09
857
30.85
4.68
4.5
95
Slant Range Performance
The accuracy of the altitude measurement of TRDI DVL’s is not specified but has been shown to be less
influenced by environmental factors. It is important to know that the systems do not measure the altitude
by using a beam that is directed straight down as an altimeter might do. Rather, they measure the “slant
range” along the four narrow beams that are at an angle to the vertical (normally 30°). In doing this, they
measure the time it takes for the transmitted pulse to travel to the bottom, be reflected, and travel back to
the instrument. This time is then multiplied by the speed of sound that either the user enters or is com-
puted from the temperature and salinity data that the instrument has. The “slant range” is then projected
into the vertical by multiplying by the Cosine of the Janus angle (normally 30°). Naturally, each beam’s
measurement of this “slant range” will change as the environment changes. These changes include vehi-
cle attitude (pitch and roll), bottom slope, and changes in the speed of sound. The next sections dis-
cuss the errors that these environmental changes cause. This is followed by a brief discussion of the addi-
tional, improved outputs that the Pathfinder DVLs provide.
Speed of Sound Variation
As the speed of sound changes through the water column either due to temperature or salinity changes,
the time it takes for the round-trip travel time changes. For example, a decrease in sound speed will cause
an increase in travel time and the instrument (not knowing about the change in sound speed) will
interpret this as a longer “slant-range”. A somewhat mitigating effect is that the beams will refract as the
sound speed changes. For example, a decrease in sound speed will refract the beam towards the vertical