









AN-000260
Document Number: AN-000260
Page 8 of 10
Revision: 1.0
5
APPLICATIONS
5.1
OBJECT DETECTION
Detecting the presence of objects or people can be optimized via software by setting the sensor’s full
-scale range (FSR). The user
may set the maximum distance at which the sensor will detect an object. FSR values refer to the one-way distance to a detected
object.
In practice, the FSR setting controls the amount of time that the sensor spends in the listening (receiving) period during a
measurement cycle. Therefore, the FSR setting affects the time required to complete a measurement. Longer full-scale range values
will require more time for a measurement to complete.
Ultrasonic signal processing using the
CH101’s
General Purpose Rangefinder (GPR) Firmware will detect echoes that bounce off the
first target in the Field-of-View. The size, position, and material composition of the target will affect the maximum range at which
the sensor can detect the target. Large targets, such as walls, are much easier to detect than smaller targets. Thus, the associated
operating range for smaller targets will be shorter. The range to detect people will be affected by a variety of factors such as a
person’s size, clothing, orientation to the sensor, and the sensor’s field
-of-view. In general, given these factors, people can be
detected at a maximum distance of 1.1m away from the EV_MOD_CH101-01-02 sensor.
5.2
BEAM PATTERNS
Sensor Mounting
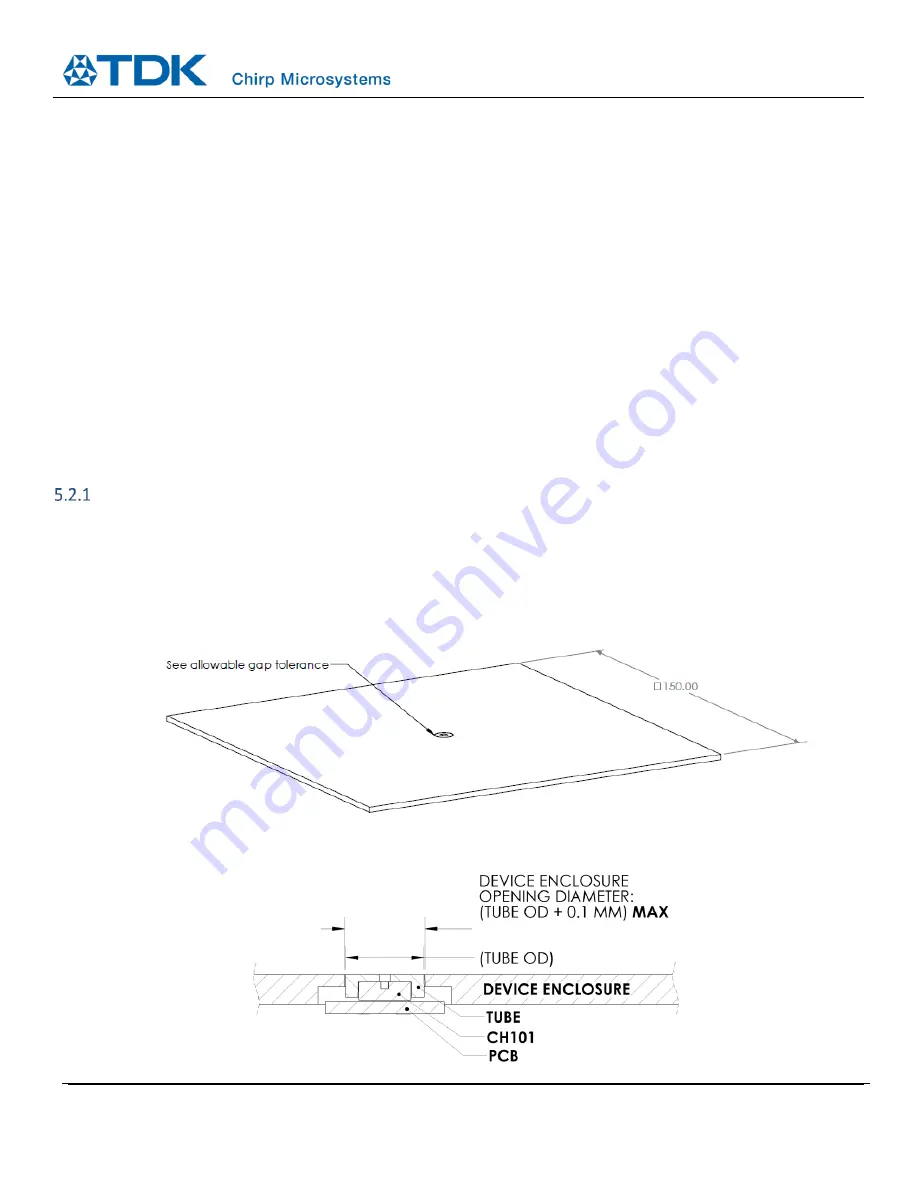
To achieve the best acoustic performance, users are recommended to mount the EV_MOD_CH101 module in a flat mounting plate.
An example mounting plate is shown in Figure 5-1, where the sensor has been inserted flush into a drilled hole of a 150mm square
plastic sheet. In Figure 5-2, the allowable mount gap tolerance between
the acoustic interface and device enclosure’s hole
is shown.
Please refer to AN-000158 CH101 Mechanical Integration Guide for detailed module and module integration information.
Figure 5-1. Recommended EV_MOD_CH101 module mounting
Figure 5-2. Mount Gap Tolerance