








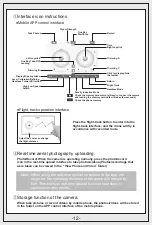





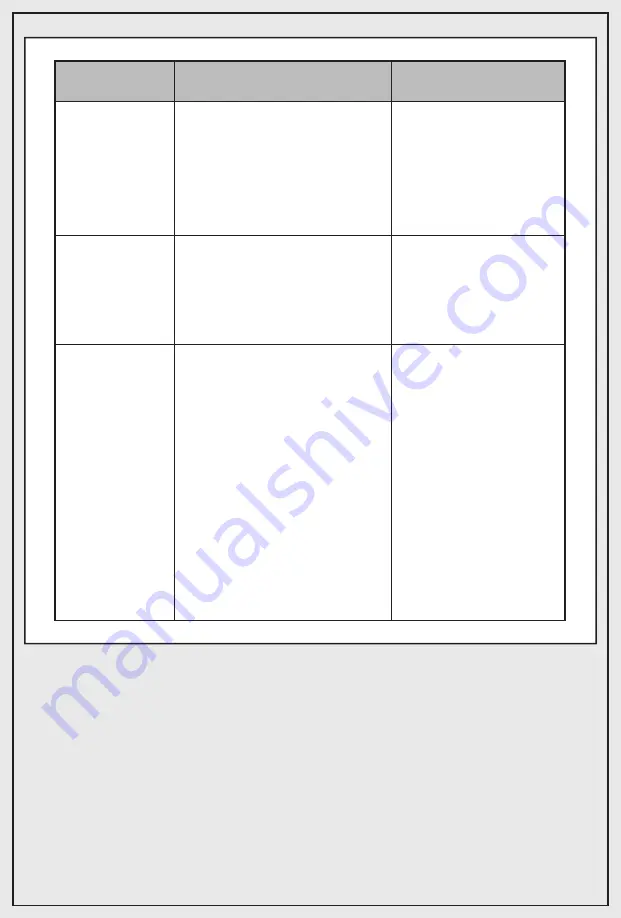
Problem
Reason
Solution
The drone is
flying towards
its side in one
direction during
hovering
1. The drone is not calibrated
level to the ground.
1. Re-adjust the calibration
until the drone is level
to the ground. For further
details, see No.3 on Page
8 for details (Level
calibration function).
In the headless
state, it is biased
towards the front
direction
Fixed high
instability / up and
down movement
1. Many collisions may cause
head biasness.
1. The drone is not calibrated
level to the ground.
2. Unstable air pressure under
the severe weather condition.
3. Violent collision resulting in
data disorder of gyroscope.
1. Re-define the front
direction. For further
details, see No.7 on Page
10 for details (Headless
Function).
1. Re-adjust the calibration
until the drone is level
to the ground. For further
details, see No.3 on Page
8 for details (Level
calibration function).
2. Avoid to fly under the
severe weather condition.
3. Make Level calibration
again, see No.3 on Page
8 for details(Level
calibration function).
-17-




































































