





























18
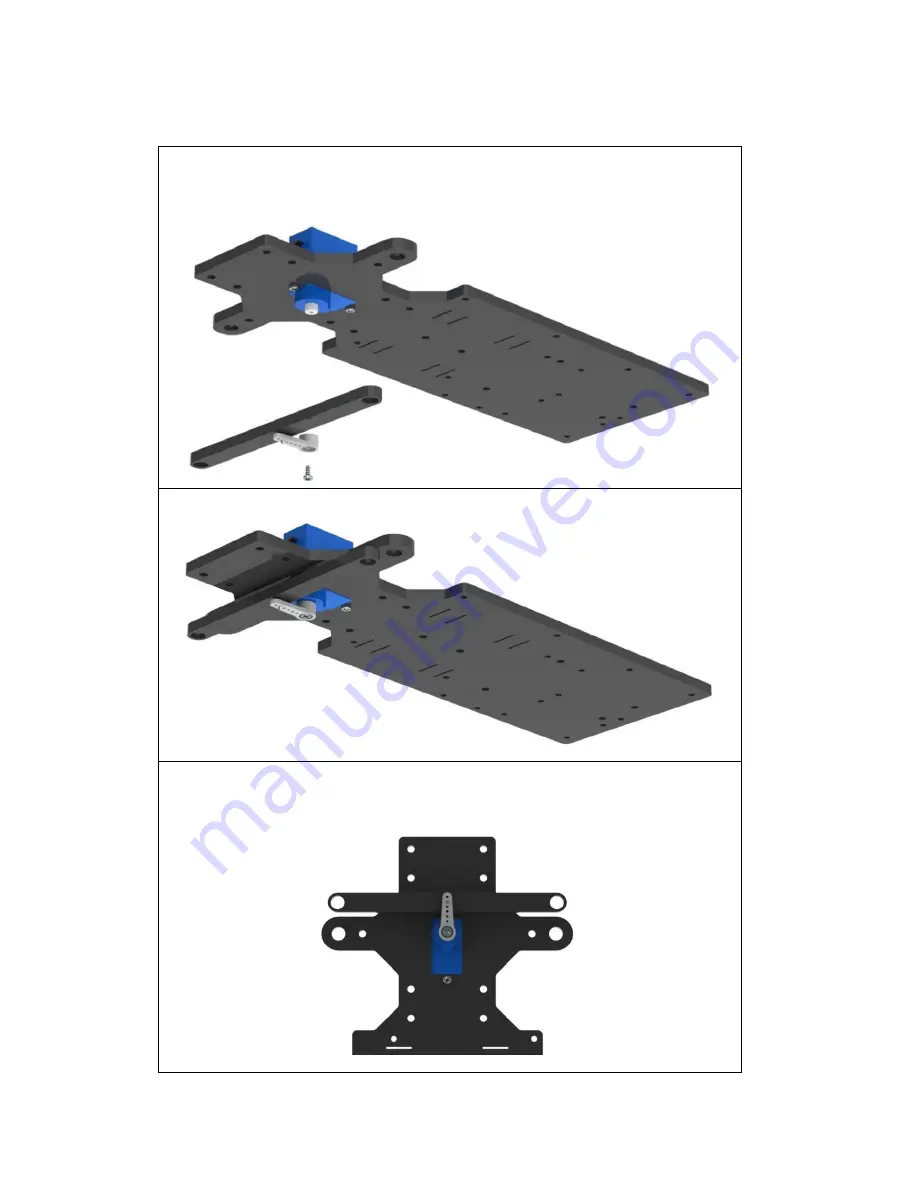
Steering Servo + Steering Linkage
a)
Connect the following parts with an M2*4 screw.
The M2*4 screw is contained in the package of the servo; it is the shortest
of the screws in the package.
b)
When completed, the assembly should look like the figure below.
Pay attention to the orientation during the assembly. If you find any error in
the assembly, do not try to turn the axis of the servo; instead, you should
disassemble it and then assemble the parts again.
Содержание Smart Video Car Kit
Страница 4: ...2 Components i Acrylic Plates ...
Страница 40: ...38 The whole picture of wiring should be like this ...
Страница 42: ...40 Now the circuit is completed Congratulations The car should be assembled successfully as shown below ...
Страница 65: ...63 Process Diagram of Client Program ...







































































