




























L6470
Phase current control
Doc ID 16737 Rev 2
31/64
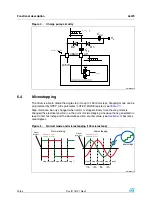
7.2
Sensorless stall detection
Depending on motor speed and load angle characteristics, L6470 offers a motor stall
condition detection using a programmable current comparator.
When a stall event occurs, the respective flag (STEP_LOSS_A or STEP_LOSS_B) is forced
low until a GetStaus command or a system reset occurs (see paragraph
7.3 Low
speed
optimization
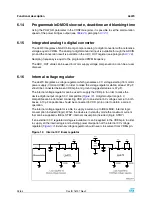
When motor is driven at a very low speed using a small driving voltage, the resulting phase
current can be distorted. As a consequence, the motor position is different from the ideal
one (see
L6470 implements a low speed optimization in order to remove this effect.
Figure 13.
Current distortion and compensation
The optimization can be enabled setting high the LSPD_OPT bit in MIN_SPEED register
(see paragraph
) and is active into speed range from zero to MIN_SPEED. When low
speed optimization is enabled, speed profile minimum speed is forced to zero.
)
PHASE
)NTHISREGIONTHEDUTYCYLCEIS
FORCEDTOZEROBYDEADTIME
T
ON
T
$4
)
PHASE
#URRENTDISTORTIONISHEAVILY
REDUCED
7ITHOUTLOWSPEEDOPTIMIZAZION
7ITHLOWSPEEDOPTIMIZAZION
!-6





















































