





























13 - 47
13. POSITIONING MODE
13.4.4 Program operation timing chart
(1) Operation conditions
The timing chart shown below assumes that the following program is executed in the absolute value
command system where a home position return is completed.
Program No. 1
Description
SPN(1000)
STC(100)
MOV(5000)
Speed (Motor speed)
Acceleration/deceleration time constant
Absolute move command
1000[r/min]
100[ms]
5000[×10
STM
μm]
Move command 1
SYNC(1)
Step is suspended until program input (PI1) turns ON.
STC(50)
MOV(7500)
STOP
Acceleration/deceleration time constant
Absolute move command
Program end
50[ms]
7500[×10
STM
μm]
Move command 2
Program No. 2
Description
SPN(1000)
STC(100)
MOV(2500)
Speed (Motor speed)
Acceleration/deceleration time constant
Absolute move command
1000[r/min]
100[ms]
2500[×10
STM
μm]
Move command 3
SYNC(1)
Step is suspended until program input (PI1) turns ON.
STC(50)
MOV(5000)
STOP
Acceleration/deceleration time constant
Absolute move command
Program end
50[ms]
5000[×10
STM
μm]
Move command 4
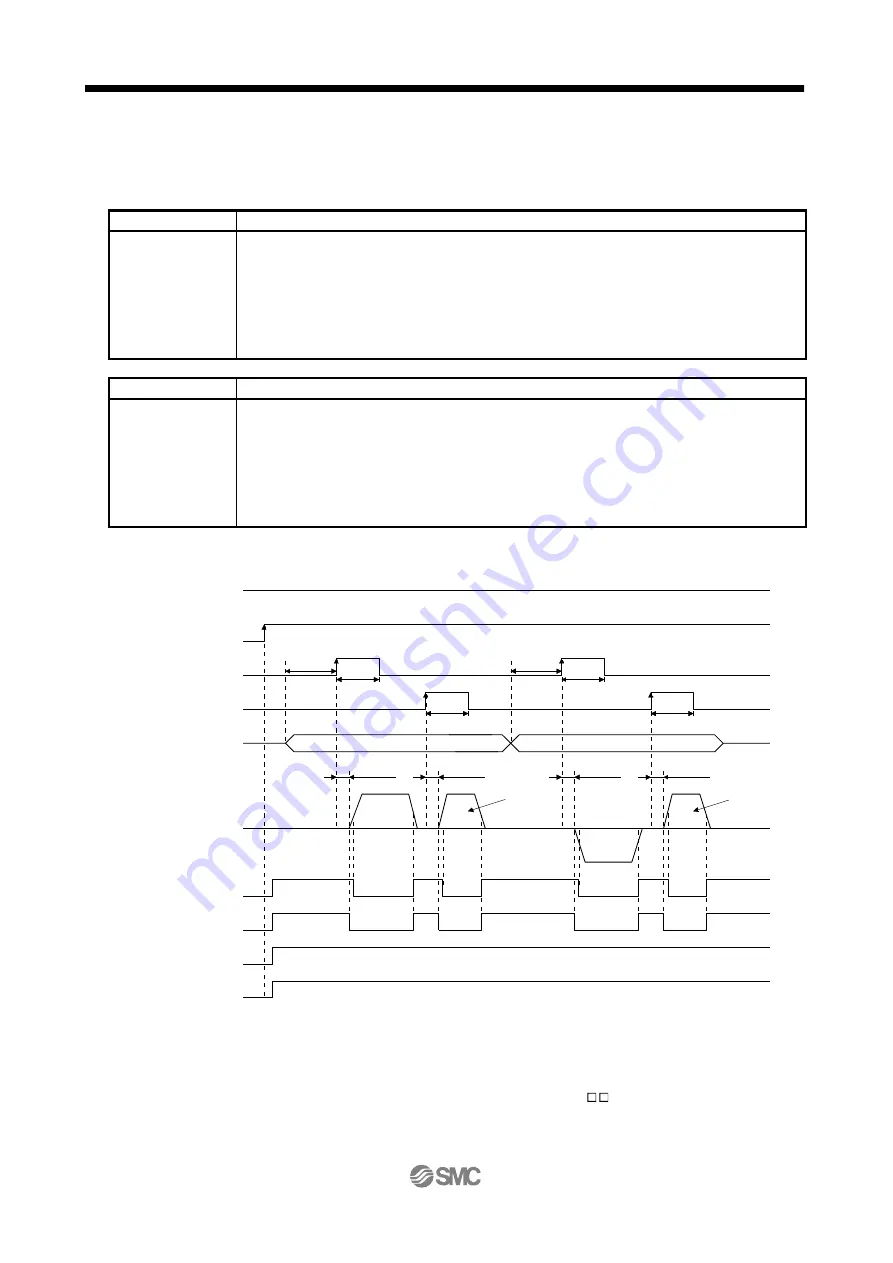
(2) Timing chart
(Note 1)
6ms or
more
6ms or more
ON
OFF
ON
OFF
Servo-on (SON)
Automatic/manual
selection (MD0)
Program No.
Forward
rotation
Reverse
rotation
0r/min
ON
OFF
Forward rotation
start (ST1)
2
1
3ms or less
Move
command 1
Move
command
3
Servo motor
speed
ON
ON
OFF
ON
OFF
Ready (RD)
Trouble (ALM)
OFF
(Note 2)
Travel completion
(MEND)
ON
OFF
Program input 1
(PI1)
3ms or less
Move
command 2
Move
command 4
6ms or more
(Note 1)
6ms or
more
6ms or more
3ms or less
3ms or less
6ms or more
ON
OFF
In-position (INP)
Note 1. External input signal detection delays by the input filter setting time of parameter No. PD19. Additionally, make up a
sequence that changes the program selection ahead of time by considering delays in output signal sequence from the PC
or PLC...etc and variations of a signal change due to hardware.
2. If the over load tough drive function is enabled by setting parameter No. PA04 to " 1", INP turn-on delays during the
overload tough drive. MEND turn-on also delays together with INP.







































































