
























PLC Subroutines Manual
64
6FC5397-0FP40-0BA0, 08/2013
Local variable definition
Table 3-40
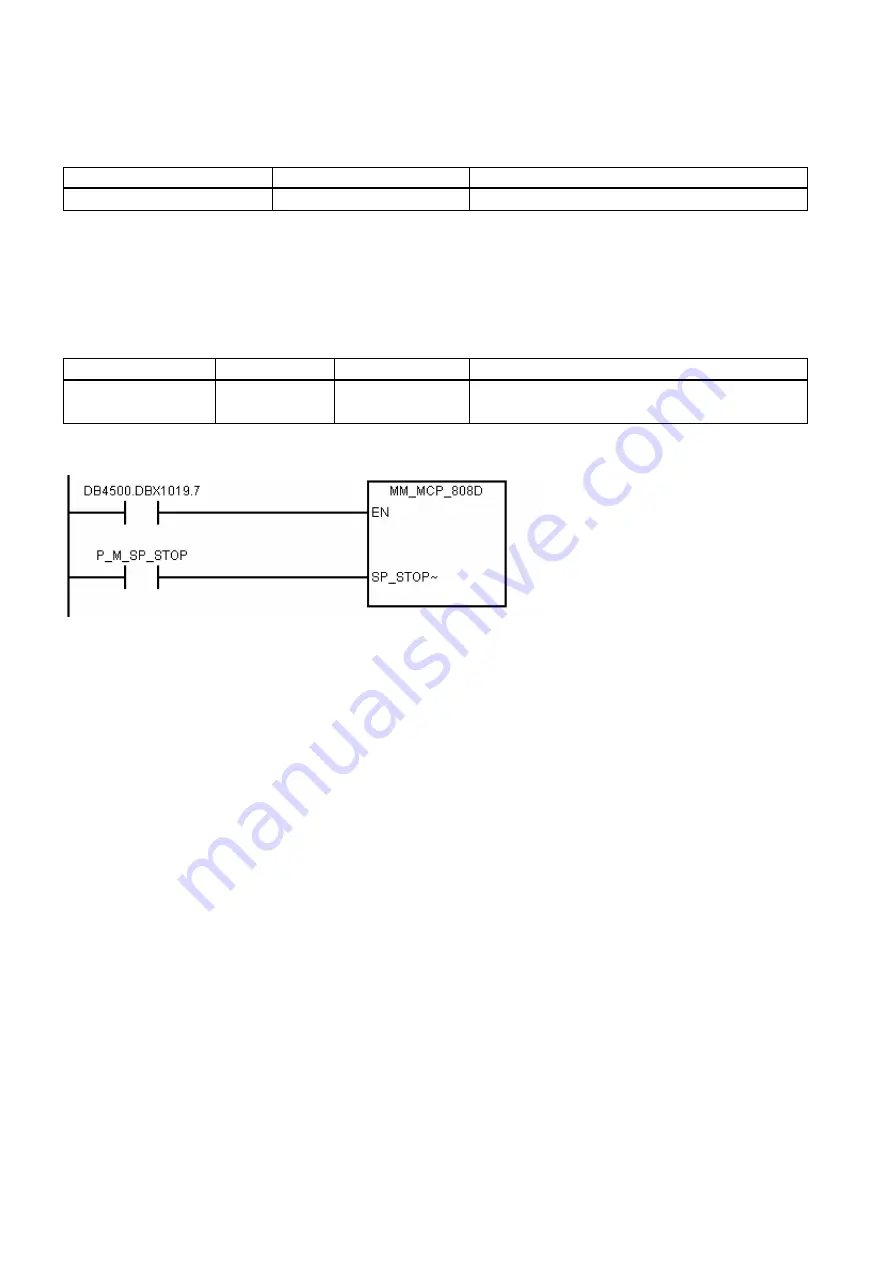
Inputs
Name
Type
Description
SP_STOP_K
BOOL
Spindle stop
Outputs
None
Assigned global variables
None
Relevant PLC machine data
No.
Unit
Range
Description
MD14512[19].7
-
-
1: to enable the manual machine function
0: to disable the manual machine function
Example for calling subroutine 59
3.32
Subroutine 60 - Disk_MGZ_M (disk-style tool magazine for milling)
Purpose
You can use subroutine 60 to control the disk-style tool magazine on a milling machine.
In the reference point mode, initialize the tool magazine by pressing the "Original position of the tool magazine" key.
In the manual mode, you can rotate the tool magazine clockwise or counter-clockwise, and enable the tool magazine to
reach the spindle or tool change position respectively through the "Clockwise rotation of the magazine", "Counter-clockwise
rotation of the magazine", "Tool magazine reaching the spindle", and "Tool magazine reaching the tool change position"
keys.
In the auto mode, you need to execute M06 to call the tool change subroutine when compiling a part program. Subroutine 60
and the tool change subroutine must be used together during the tool change process. Three operations are involved in the
tool change control, that is, tool return, tool retrieval, and tool change.
1.
The tool return operation is to return the tool on the spindle back to the tool magazine disk when compiling T0 and a tool
is located on the spindle.
2.
The tool retrieval operation is to get the desired tool from the tool magazine disk and install it on the spindle when
compiling Tx (x ≠ 0) and no tool is on the spindle.
3.
The tool change operation is to first return the tool on the spindle back to the tool magazine disk and then get the desired
tool from the tool magazine disk when compiling Tx (x ≠ 0; x ≠ number of the tool on the spindle).
For details, please refer to the tool change subroutine.
The following machine data is involved in this subroutine:
MD10715: M_NO_FCT_CYCLE[0]
MD10716: M_NO_FCT_CYCLE_NAME[0]
MD22550: TOOL_CHANGE_MODE







































































