





























Technical Appendix
6.3
PLC user program for turning (UPGMTURN)
6-144
SINUMERIK 802S
6FC5 597–2AA00–0BP2 (01.02)
[4]
O 0.7
O 0.6
O 0.5
O 0.4
O 0.3
O 0.2
O 0.1
O 0.0
Output valid
[5]
O 1.7
O 1.6
O 1.5
O 1.4
O 1.3
O 1.2
O 1.1
O 1.0
Output 0-active
[6]
O 0.7
O 0.6
O 0.5
O 0.4
O 0.3
O 0.2
O 0.1
O 0.0
Output 0-active
[7]
O 1.7
O 1.6
O 1.5
O 1.4
O 1.3
O 1.2
O 1.1
O 1.0
MCP customer key valid
[8]
K7
K6
K5
K4
K3
K2
K1
K0
MCP customer key valid
[9]
K9
K8
Rotation monitoring active
[10]
Z axis
X axis
Machine configuration
[11]
Override
active
Key
assignment
X axis
Input valid
:
0 - demask input not used
1 - input is used
Output valid
:
0 - demask output not used
1 - output is used
Input / output 0-active:
0 - All signals use positive logic as standard, i.e.
logic 1-active (24V).
1 - When connecting to systems with negative
logic, i.e. logic 0-active (0V).
MCP customer key valid:
0 - Demask MCP customer keys not used
1 - MCP customer key is used
Rotation monitoring active: 0 - Rotation monitoring function is not used
1 - Rotation monitoring is activated for the relevant axis (X, Z)
after referencing the axis. The UPGMTURN sets the Rotation Monitoring interface signal
(390x5000.0) (see ”Technical Manual: Rotation Monitoring of Step-Switching Motor with
BERO”)
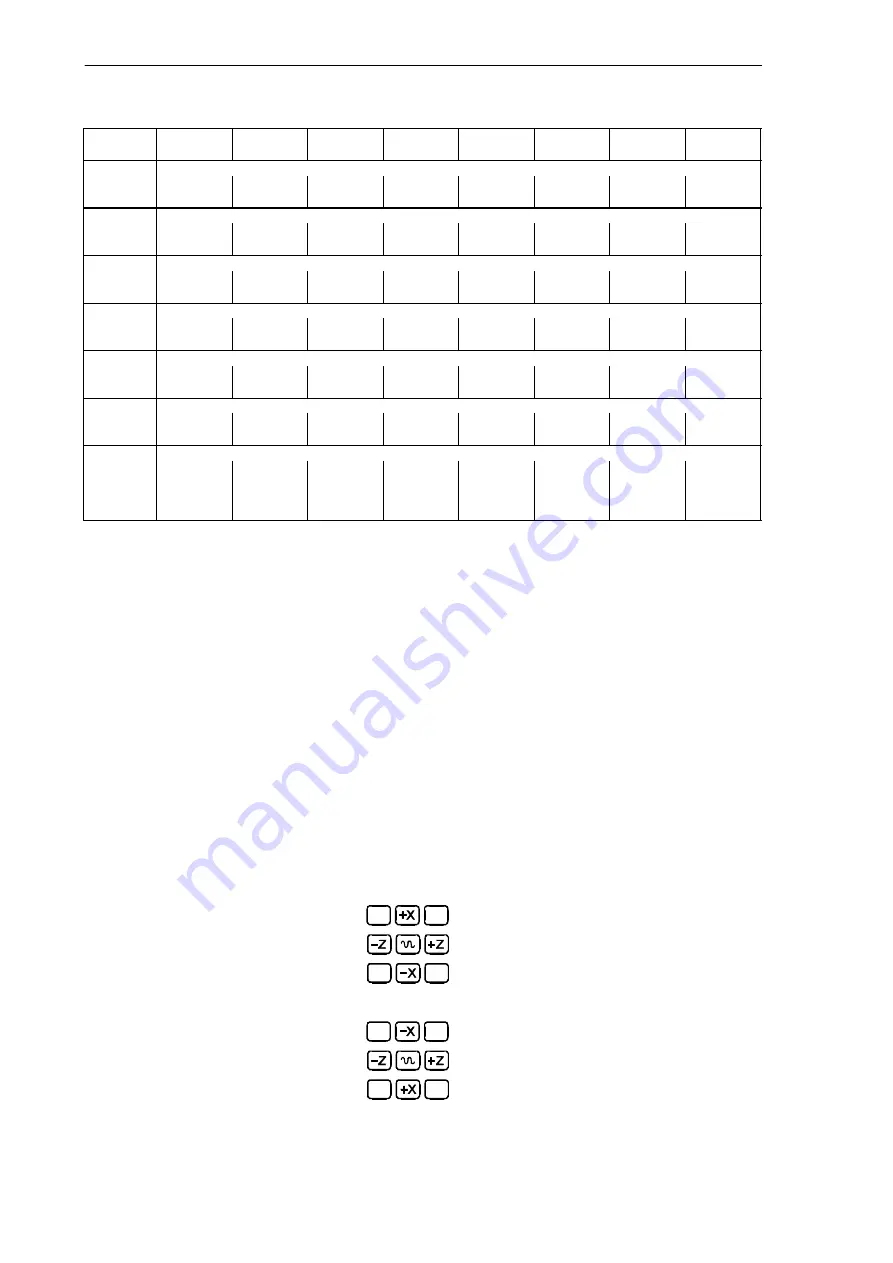
Machine configuration: (bit0) key assignment X axis to MCP
0 – tool behind turning center
1 – tool ahead of turning center
Содержание SINUMERIK 802S
Страница 1: ...Start Up 01 2002 Edition SINUMERIK 802S ...
Страница 2: ......
Страница 8: ...Table of Contents viii SINUMERIK 802S 6FC5 597 2AA00 0BP2 01 02 notice ...
Страница 104: ...Start Up 4 7 Commissioning 4 104 SINUMERIK 802S 6FC5 597 2AA00 0BP2 01 02 ...
Страница 170: ...Index Index 170 SINUMERIK 802S 6FC5 597 2AA00 0BP2 01 02 notice ...
Страница 172: ......





















































