SYSTEM DESCRIPTION
3
25
8020776/12AX / 2019-05-31|SICK
Subject to change without notice
O P E R A T I N G I N S T R U C T I O N S |Free Flow Profiler
3.3
System operating principle
3.3.1
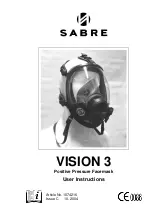
Operating principle of vehicle detection
As soon as a vehicle passes through the measurement site, the 2D LiDAR sensors record
its contour.
The 2D LiDAR sensors do this by establishing the measuring range and using a non-
contact process to scan the vehicle. The profiling system does not require any reflectors
or position marks to do this. It is an active system featuring eye-safe infrared lasers.
Fig. 11: Operating principle of vehicle detection
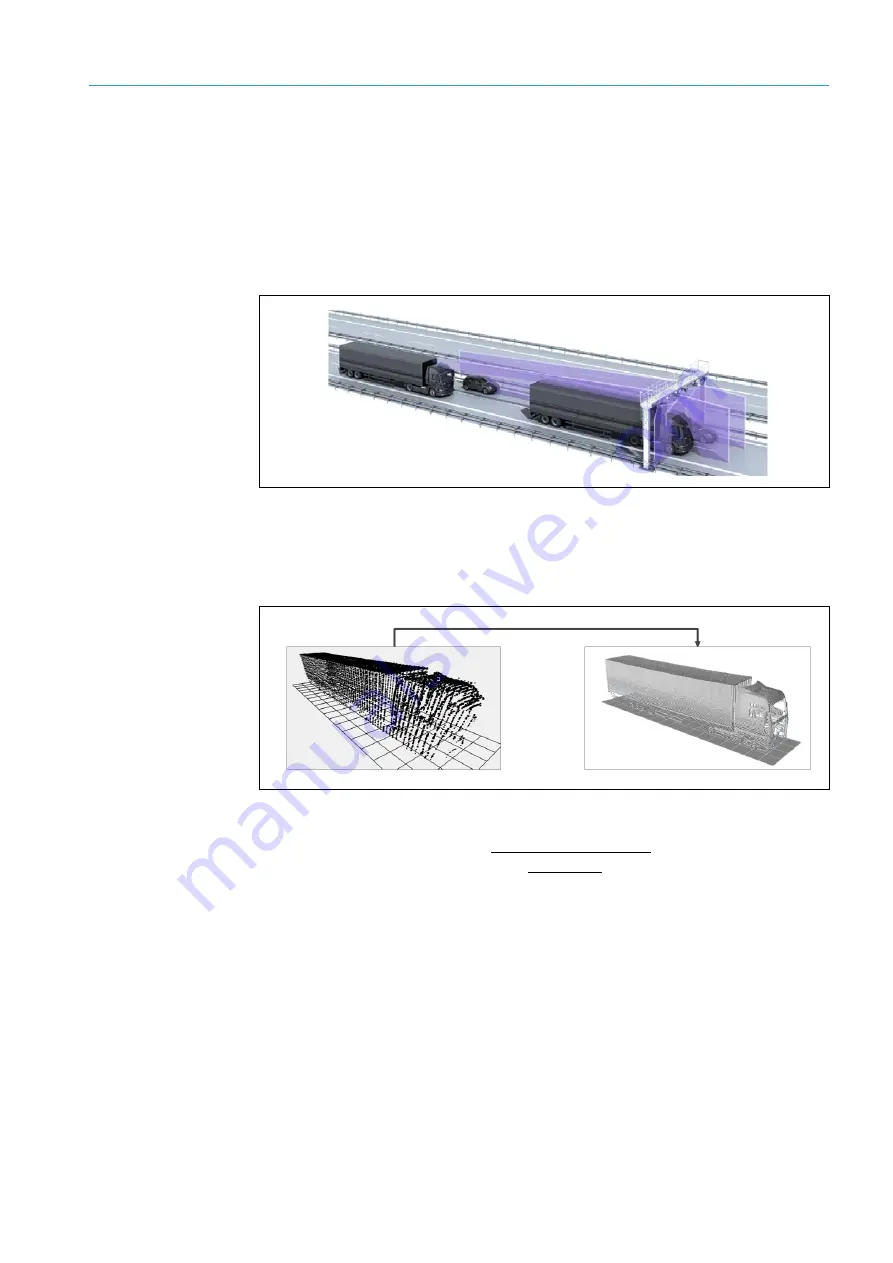
The system uses the measurement data obtained to generate a three-dimensional model
of the vehicle. The 3D model serves as the basis for further calculations, such as
dimensioning, vehicle classification, or axle counting.
Fig. 12: 3D point cloud
Any measuring points resulting from environmental influences (such as fog, rain or snow)
that cannot be attributed to the object are suppressed using special filters. This means
that the measurement process can be optimized and refined to a considerable extent,
even in harsh ambient conditions.
Notes