















5.3.2
Connettore di temperatura
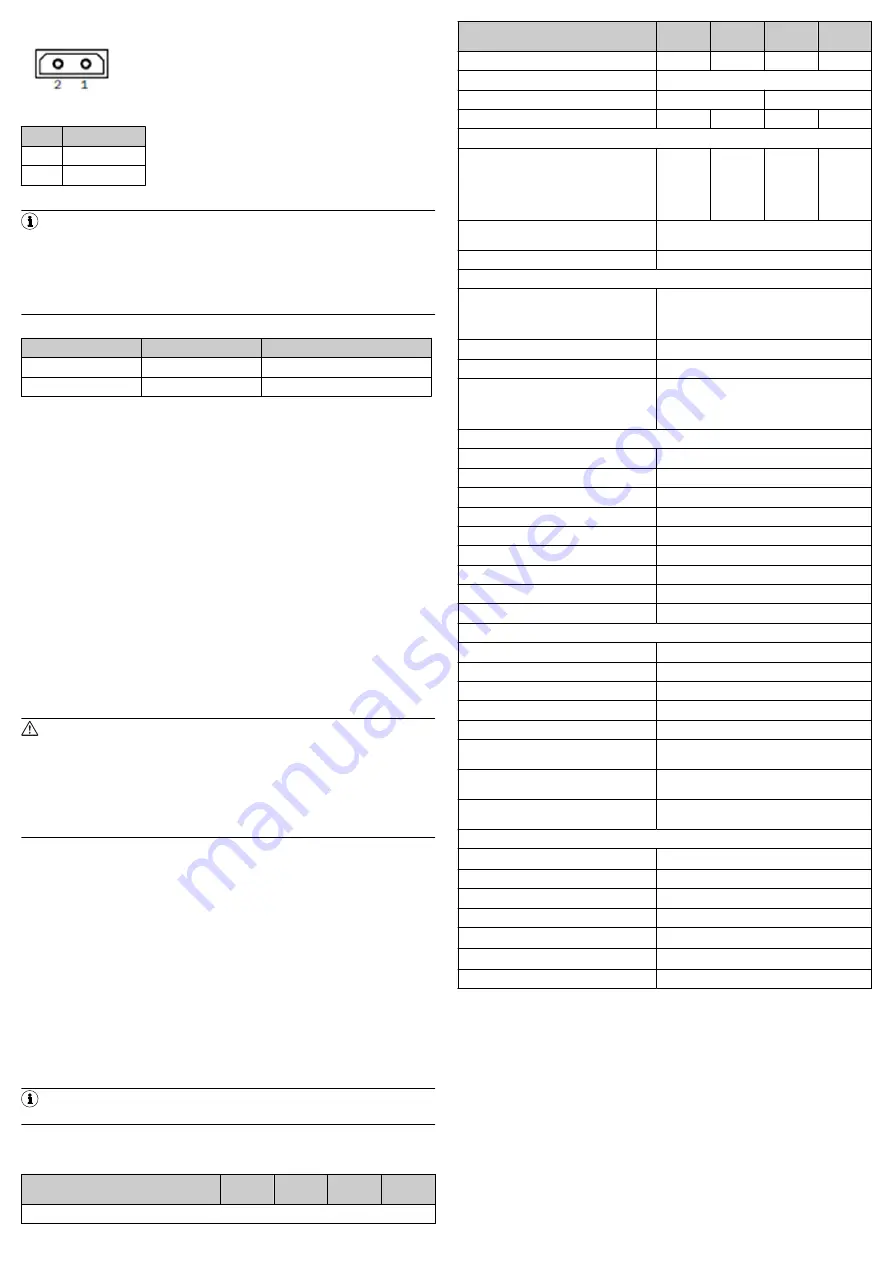
Figura 3: Occupazione dei pin lato apparecchio
PIN
Segnale
1
T+
2
T-
5.3.3
Collegamento delle interfacce
INDICAZIONE
Il sistema Motor Feedback consente un’uscita radiale (fig. 5) dei cavi di colle‐
gamento elettrici (9), (11).
Se necessario, aprire la copertura (1) con l’aiuto di un cacciavite (figura A).
Far scattare in sede il connettore (8) senza tensione nella presa (10). Se
necessario, far scattare in sede il connettore (11) senza tensione nella presa
(12).
Posizione di connettore / presa
Tipo
Connettore maschio
Presa
DSL
10
8
Temperatura
12
11
Condurre fuori il cavo DSL (9) ed eventualmente il cavo del sensore di tempera‐
tura (11) tenendo conto delle cavità nell’alloggiamento (2) e nella copertura (1).
Chiudere la copertura (1).
6
Messa in servizio
Per la messa in funzione dei sistemi di sicurezza Motor Feedback si prevede che il
costruttore del sistema di azionamento collegato debba soddisfare, in fase di
posa del sistema stesso, i requisiti di sicurezza descritti nel manuale d’implemen‐
tazione “HIPERFACE DSL
®
Safety”.
6.1 Verifiche
Durante la messa in funzione verificare che venga utilizzato un sistema di sicu‐
rezza Motor Feedback EES37-2 / EEM37-2 e non un sistema Motor Feedback
standard EES37-0 / EEM37-0. Questo deve essere verificato attraverso la lettura
del nome del modello (risorsa 083h). Inoltre, in un sistema di sicurezza Motor
Feedback EES37-2 / EEM37-2 dopo aver eseguito un RESET dell’encoder (RESET
hardware o software) deve essere impostato il bit POST (Power-On-Self-Test). Il bit
POST può essere quietanzato dopo aver completato la verifica con esito positivo
(vedi manuale di implementazione “HIPERFACE DSL
®
Safety”).
In caso di modifica dell’offset della posizione del sistema Motor Feedback tramite
la risorsa 101h (“Imposta posizione”) o 108h (“Impostazioni di fabbrica”) è neces‐
sario verificare che il sensore fornisca il valore di posizione desiderato.
Per il funzionamento non sono richiesti ulteriori misure di collaudo.
AVVERTENZA
Il sistema di sicurezza Motor Feedback ha una durata d’uso massima
(
), scaduta la quale va comunque messo fuori servizio.
L’anno di costruzione del sistema Motor Feedback viene indicato mediante
un codice (YYWW) sull’etichetta dell’apparecchio o nell’etichetta dell’imbal‐
laggio nel numero di serie (SN).
YY = indica l’anno (senza il secolo)
WW = indica la settimana di calendario dell’ultimo processo di produzione.
7
Manutenzione
Il sistema di sicurezza Motorfeedback è esente da manutenzione. In caso di difetti
non è possibile eseguire alcuna riparazione. In caso di dispositivi difettosi vi pre‐
ghiamo di contattarci comunque affinché si possa analizzare la causa del guasto.
8
Messa fuori servizio
8.1 Tutela dell’ambiente
Il sistema di sicurezza Motor Feedback è concepito in modo da ridurre il più possi‐
bile l’impatto ambientale. Esso consuma soltanto un minimo di energia e di
risorse.
b
Rispettare l’ambiente anche sul posto di lavoro. Osservare pertanto le
seguenti informazioni sullo smaltimento.
8.2 Smaltimento
Smaltire sempre gli apparecchi inutilizzati o non riparabili secondo le disposizioni
di smaltimento in vigore, specifiche per ogni paese.
INDICAZIONE
Siamo a vostra disposizione per lo smaltimento del dispositivo. Contattateci.
9
Dati tecnici
Dati tecnici
EES37-2
...15 A
EES37-2
...17 A
EEM37-2
...15 A
EEM37-2
...17 A
Prestazione
EES37-2
...15 A
EES37-2
...17 A
EEM37-2
...15 A
EEM37-2
...17 A
Risoluzione per rotazione
15 bit
17 bit
15 bit
17 bit
Rumore di segnale (σ)
± 20”
62
Numero di giri rilevabili in modo assoluto
1
4.096
Passi di misura per rotazione
32.768
131.072
32.768
131.072
Precisione di sistema
Posizione nominale, 25 °C, impostazione
del filtro
21 kHz
Posizione nominale, 25 °C, impostazione
del filtro
1 kHz
±
280"
63
±
190"
63
±
240"
63
±
160"
63
±
280"
63
±
190"
63
±
240"
63
±
160"
63
Numero giri max. all’accensione o al reset
del sistema Motor Feedback
≤
0,5 giri/min
Spazio di memoria disponibile
8.192 byte
Interfacce
Direzione di conteggio
La direzione di conteggio è ascendente in caso
di rotazione dell’albero (in senso orario) guar‐
dando in direzione “A”. (vedere disegno quo‐
tato)
Interfaccia di comunicazione
HIPERFACE DSL
®
64
Tempo di inizializzazione
≤
500 ms
65
Misura della resistenza di temperatura
esterna
66
Risoluzione
Campo di misura
32 bit senza segno (1 Ω)
0 … 209.600 Ω
Meccanica/elettrica
Campo della tensione di alimentazione
7 V … 12 V
Tempo di accensione rampa di tensione
≤
180 ms
67
Corrente d’esercizio
≤
150 mA
68
Peso
≤
0,06 kg
Momento d’inerzia del rotore
1 gcm²
Accelerazione angolare
≤
500.000 rad/s²
Velocità di esercizio
≤
12.000 giri/min
Movimento ondulatorio ammesso, radiale
± 0,15 mm
Movimento ondulatorio ammesso, assiale
± 0,5 mm
Dati ambientali
Intervallo di temperatura d’esercizio
–40 °C … +115 °C
69
Campo di temperature immagazzinaggio
–40 °C … +125 °C (senza imballaggio)
Altezza di esercizio
≤
2.000 m sul livello del mare (80 kPa)
Umidità relativa dell’aria/condensa
85% / Condensa non ammessa!
Resistenza agli urti
100 g / 6 ms (secondo EN 60068-2-27)
Resistenza alle vibrazioni
50 g / 10 … 2.000 Hz (secondo EN
60068-2-6)
EMC
EN 61000-6-2: 2016, EN 61000-6-4: 2006 e
IEC 61000-6-7: 2014
70
Grado di protezione
71
IP 30 con la copertura chiusa
(Secondo IEC 60529-1)
Caratteristiche relative ai dati di sicurezza
SIL
72
SIL2 (IEC 61508), SIL
CL
3 (EN 62061)
Idoneità sistematica
SC 3 (IEC 61508)
PL
72
PL d (EN ISO 13849)
Categoria
3 (EN ISO 13849)
PFH
D
: probabilità di guasto/h pericoloso
73
26 * 10
-9
T
M
(TM)
20 anni
Velocità di test
24 h
62
Posizione nominale, 25 °C, impostazione del filtro 21 kHz
63
Vedi informazioni sul prodotto online (DE: 8021249; EN: 8021250) - Diagramma dei limiti
di guasto (impostazione del filtro di default: 21 kHz)
64
Per il collegamento con un regolatore dell’azionamento, è necessario implementare nel
regolatore una variante Safety del DSL Master IP-Core, vedere il manuale di implementa‐
zione “HIPERFACE DSL
®
Safety” (8017596).
65
A partire dal raggiungimento di una tensione di esercizio ammessa.
66
Senza tolleranza del sensore; a -17 °C … +167 °C: NTC ± 2K (103 GT); PTC ± 3K (KTY
84/130)
67
Durata della rampa di tensione tra 0 V e 7 V.
68
In caso di utilizzo del collegamento di ingresso proposto, come descritto nel manuale di
implementazione “HIPERFACE DSL
®
Safety“ (8017596, ultimo aggiornamento 2.2017).
69
Per la misurazione della temperatura d’esercizio si deve usare il punto di misura definito
(13) sul sistema Motor Feedback. (vedere figura di montaggio 6)
70
Viene garantita l’EMC conformemente alle norme indicate se il sistema Motor Feedback con
controconnettore inserito è collegato al punto di messa a terra centrale del regolatore del
motore mediante una schermatura del cavo. Se si utilizzano altri tipi di schermatura,
l’utente deve eseguire propri test specifici. Dispositivo della classe A.
71
IP 54 richiesto nello stato montato
72
Per informazioni dettagliate sulla posa esatta della macchina/dell’impianto contattare la
filiale SICK di competenza.
73
A temperatura ambiente 60 °C
8021265/17O7/2020-03-31/de, en, es, fr, it
EES37-2... EEM37-2... | SICK
19