

























11
CSD5 Digital Servo Drives
Mating Connectors
Drive Displays
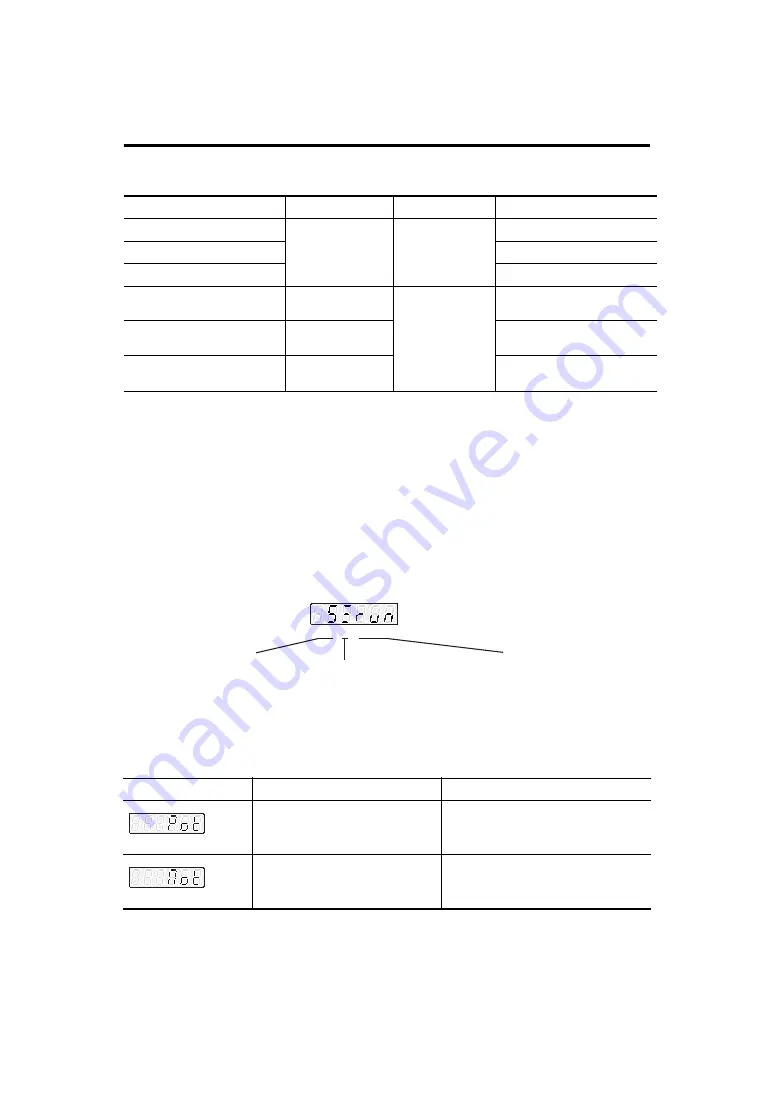
The 7-segment display provides operational information when the drive is functioning, or
warning/error messages when abnormalities are encountered.
Normal operational information consists of six characters that display data in three categories. The
categories consist of a Control Mode (characters 4 and 5), a Row Display (3), and Status (0 to 2).
Figure 6 depicts these categories and defines the information provided. Overtravel displays (see the
table following Figure 6) occur if the drive detects an overtravel condition.
Figure 6
Operational Drive Displays
Connector Type
Wire
Size
Manufacturer
P/N
Input Power
Single-row, spring
clamp connectors
with 7.5 mm spacing
0.08 - 2.5 mm
2
(12 - 28 AWG)
8 mm (0.3 in.) of
wire exposed
Wago 231-206/026-000
1
Shunt Power
Wago 231-202/026-000
1
Output (Motor) Power
Wago 231-203/026-000
1
Input/Output 50-pin
mini-D
0.2
mm
2
(24 - 30 AWG)
3M. 10150-3000PE (Connector)
3M. 10350-52F0-008 (Case)
Motor Feedback
20-pin mini-D
3M. 10120-3000PE (Connector)
3M. 10320-52F0-008 (Case)
Serial Interface
Comm0A, Comm0B
6-pin 1394
3M
.
3E306-3200-008 (Connector)
3M
.
3E206-0100 KV (Case)
1 Tool (Wago 231-131) for opening individual cage clamps on above power connectors is supplied.
Overtravel Display
Possible Cause
Action/Solution
Positive Overtravel
A Positive Overtravel condition is
detected.
Apply motion in a negative direction to back
off limit.
Negative Overtravel
A Negative Overtravel condition is
detected.
Apply motion in a positive direction to back
off limit.
Character: 5 4 3 2 1 0
rdy = Drive is disabled, but ready to be enabled
run = Drive is enabled and motor is under control
Status: Characters 0 through 2
Middle Row = Active if velocity exceeds Up To Speed parameter
Row Display: Character 3
Top Row = Inactive for any Current mode
Active if Velocity Mode. and Velocity Error is within the velocity window
Active if Follower Mode. and Position Error is within following error setting
Bottom Row = Active for hall startup motors once the commutation angle is set
Active for motor once the first index pulse occurs
C = Analog Current
Control Mode: Characters 4 and 5
F = Follower
S = Analog Speed
P = Preset Velocity
I = Indexing
Содержание CSD5
Страница 2: ......
Страница 26: ...26 CSD5 Digital Servo Drives 전원 결선도 䟀 ...
Страница 40: ...Publication CSD5 IN001C Drive EK June 2013 Copyright 2013 RS Automation Co Ltd All rights reserved ...







































































