

























Rockwell Automation Publication 2198-RM005A-EN-P - October 2020
43
Chapter
4
System Architecture
The Kinetix® 350 single-axis EtherNet/IP servo drive is designed to provide a
solution for applications with output power requirements between 0.4…3.0 kW
(2…12 A rms).
Drive System Overview
This section lists the typical system components and compares some
configurations of Kinetix 350 and Kinetix 5300 drives. The Kinetix 5300 drives
are flexible to provide integration into your existing application or can be
designed to meet your new application requirements.
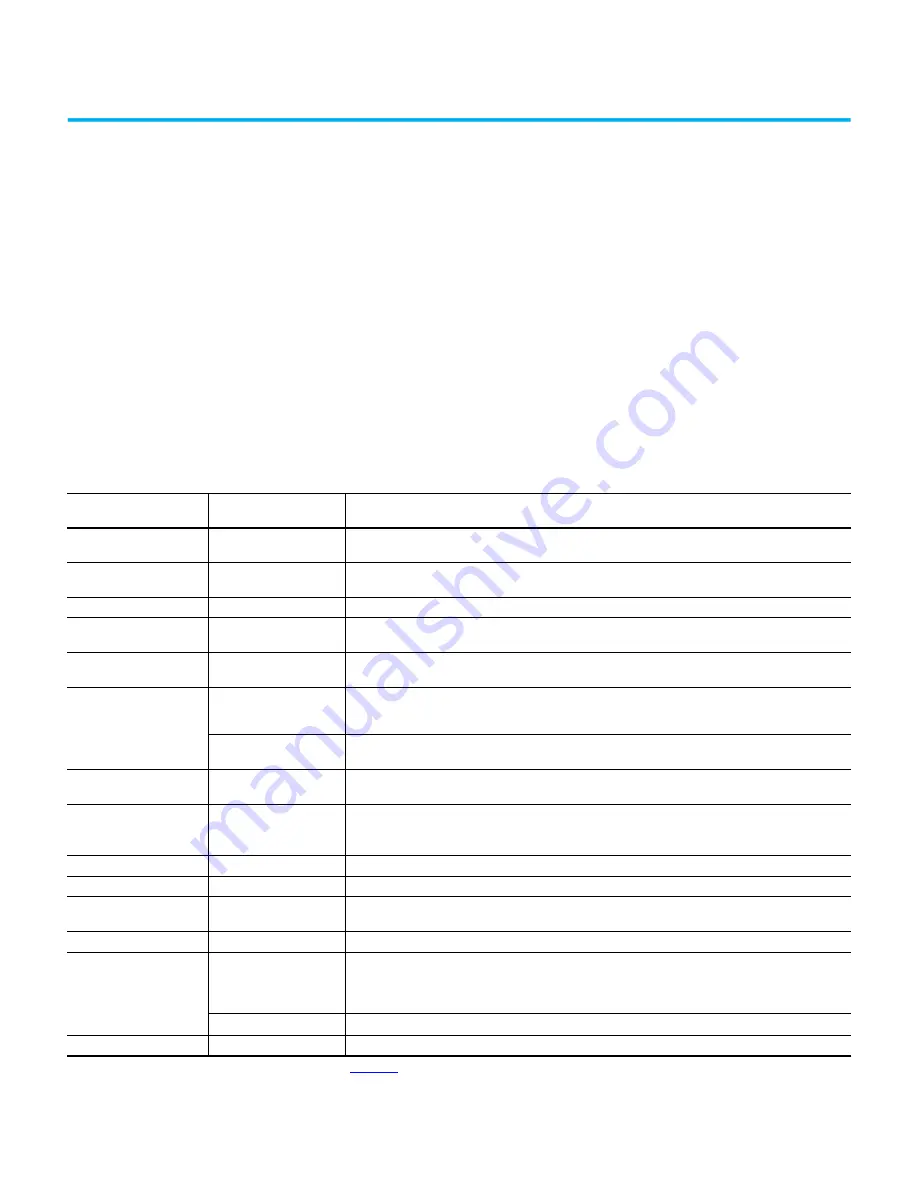
Table 35 - Kinetix 350 Drive System Overview
Kinetix 350 System
Component
Cat. No.
Description
Kinetix 350 Integrated Motion
on EtherNet/IP Servo Drive
2097-V3
x
PR
x
-LM
Kinetix 350 integrated motion on EtherNet/IP drives with safe torque-off feature are available with 120/240V
or 480V AC input power.
AC Line Filters
2090
2097-F
x
Bulletin 2090 and Bulletin 2097-F
x
AC line filters are required to meet CE with Kinetix 350 drives without an
integrated line filter. Bulletin 2097 filters are available in foot mount and side mount.
Shunt Module
2097-R
x
Bulletin 2097 shunt resistors connect to the drive and provides shunt capability in regenerative applications.
Terminal block for I/O
connector
2097-TB1
50-pin terminal block. Use with IOD connector for control interface connections.
Stratix® 2000 Ethernet
Switch
1783-US05T
An Ethernet switch divides an Ethernet network into segments and directs network traffic efficiently.
Logix PAC® Controller
Platforms
Bulletin 5069
Bulletin 1768 and 1769
EtherNet/IP networking with CompactLogix™ 5370 and CompactLogix 5380 controllers with embedded dual-
port. 1769-L3
x
controllers with embedded single port. 1768-L4
x
controller and 1768-L4
x
S safety controller with
1768-ENBT EtherNet/IP communication module.
1756-EN2T, 1756-EN2TR, and
1756-EN3TR module
EtherNet/IP network communication modules for use with ControlLogix® 5570 and ControlLogix 5580
controllers.
Studio 5000® Environment or
RSLogix 5000® Software
—
RSLogix® 5000 software (version 20 or earlier) and the Studio 5000 Logix Designer® application (version 21 or
later) are used to program, commission, and maintain the Logix family of controllers.
Encoder Output Module
(1)
2198-ABQE
The Allen-Bradley
®
encoder output module is a DIN-rail mounted EtherNet/IP network-based standalone
module capable of outputting encoder pulses to a customer-supplied peripheral device (cameras, for
example, used in line-scan vision systems).
Rotary Servo Motors
Kinetix MP, Kinetix TL
Compatible rotary motors include the Kinetix MP (Kinetix MPL, MPM, MPF, and MPS) and Kinetix TL/TLY motors.
Linear Stages
Kinetix MP (Ballscrew)
Compatible stages include Kinetix MP (Kinetix MPAS) Integrated Linear Stages.
Electric Cylinders
Kinetix MP, Kinetix TL
Compatible electric cylinders include Kinetix MP and Kinetix TL (Kinetix MPAR, TLAR, and MPAI) Electric
Cylinders.
Encoder
842E-CM
Integrated Motion Encoder on EtherNet/IP network.
Cables
Motor/brake and feedback
cables
Motor power/brake and feedback cables include SpeedTec and threaded DIN connectors at the motor.
Power/brake cables have flying leads on the drive end and straight connectors that connect to servo motors.
Feedback cables have flying leads that wire to low-profile connector kits on the drive end and straight
connectors on the motor end.
Communication cables
1585J-M8CBJM-
x
(shielded) or 1585J-M8UBJM-x (high-flex shielded) Ethernet cable.
Feedback Connector Kit
2090-K2CK-D15M
Low-profile connector kit for motor feedback signals.
(1)
See Encoder Output Module Installation Instructions, publication
. For information to help you install and wire the 2198-ABQE Encoder Output Module.







































































