





























Robotiq 2-Finger Adaptive Robot Gripper - 200
Instruction Manual
Robotiq inc. © 2008-2013
97
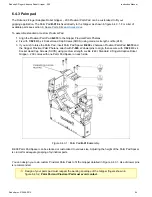
6.5 Finger movement
Figure 6.5.1 relates the Finger opening (distance between the two Finger Pads) to the corresponding ''Go To''
position request (from a range of 0 to 255), see section
4.6 Robot output registers & functionalities
position control. See figure 6.5.2 for a representation of Finger movement.
Figure 6.5.1 Finger opening for ''Go To'' position request.
Info
Finger opening is linear to R = 0.998 within the ''GO TO'' request of 15 to 225. Within this range
2
Finger opening has an approximate value
.
O = 0.98 mm * (220-GOTO)
From the 0 to 15 GO TO mark the Gripper is fully opened, while it is fully closed over 225.