


























Содержание RQ PLUS 130
Страница 1: ...ROBOT CONSTRUCTION KIT Construct more than 30 models with RQ 110 RQ 120 and RQ 130 ...
Страница 2: ...List BASICS Tank Bot Four wheeled Bot Dino Vulcan Bot Forklift 06 12 30 48 68 88 ...
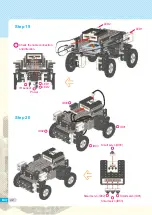
Страница 20: ...Step 16 Tip Tip 3s rivet X4 2s rivet X1 Step 15 22 ...
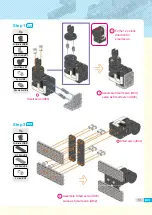
Страница 22: ...Smart servo ID00 Smart servo ID01 Smart servo ID02 Tip Double rivet X4 Step 20 Step 19 24 ...
Страница 23: ... Tank Bot is ready completion 25 ...
Страница 27: ...MEMO 29 ...
Страница 37: ...Step 14 Tip Tip 2s rivet X2 2s rivet X8 Step 13 Step11 39 ...
Страница 45: ...MEMO 47 ...
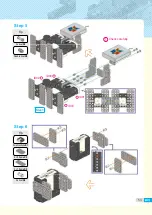
Страница 52: ...Step 8 Tip Tip 3s rivet X3 3s rivet X3 Step 7 Step5 54 ...
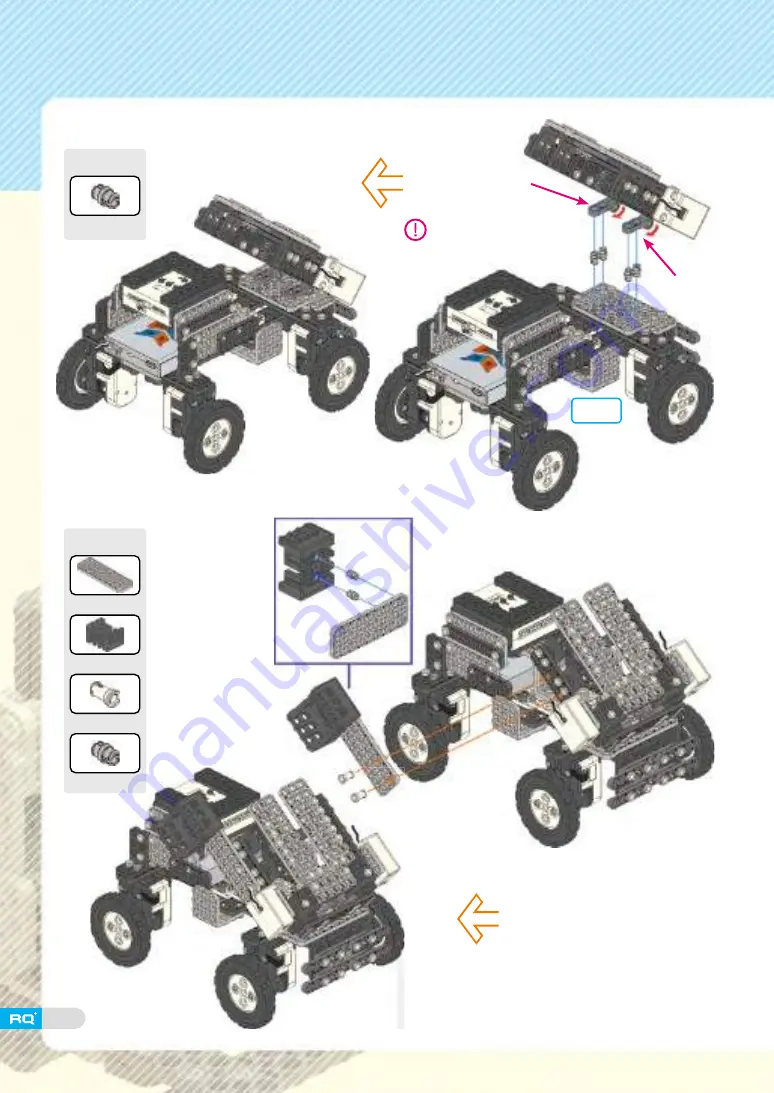
Страница 54: ...Step 12 Tip Double rivet X2 Step 11 R motor ID30 R motor ID29 R motor ID30 Power Check the cable connection 56 ...
Страница 59: ...Step 22 Tip Tip 3 4 L frame X2 Spacer X2 2s rivet X6 3s rivet X4 7 7 frame X1 2s rivet X4 Step 21 Step19 61 ...
Страница 60: ...Step 24 Tip Tip 2s rivet X4 Double rivet X2 Step 23 Step17 Step18 62 ...
Страница 61: ... Dino robot is ready completion 63 ...
Страница 65: ...MEMO 67 ...
Страница 71: ...Step 6 Tip Tip 3 7 frame X2 3 9 frame X3 3s rivet X8 2s rivet X4 Step 5 73 ...
Страница 81: ... Vulcan Bot is ready completion Tip Double rivet X4 Step 25 83 ...
Страница 85: ...MEMO 87 ...
Страница 94: ...Step 13 Step 12 Tip Tip 2s rivet X4 2s rivet X8 Step6 96 ...
Страница 99: ...Step 23 Step 22 Tip 5 5 frame X2 2s rivet X8 Smart servo ID03 Smart servo ID02 Power Step14 101 ...
Страница 102: ...Step 29 Step 28 Tip Tip 2 5 frame X2 3s rivet X6 1 8 frame X4 Rubber pad X4 2s rivet X8 Fork for forklift Step26 104 ...
Страница 103: ... Forklift robot is ready completion Do not force the forklift to move It may damage the smart servo and gear 105 ...
Страница 106: ... Complete of an additional battery case for Forklift Step 4 completion 108 ...
Страница 113: ...MEMO 115 ...
Страница 122: ...Tip Tip 2s rivet X2 2s rivet X2 Step 11 Step 12 Step7 Smart servo ID02 Smart servo ID03 It becomes the tongs 124 ...
Страница 126: ...Tip Tip 3 4 L frame X2 2s rivet X4 3 4 L frame X2 2s rivet X4 Step 19 Step 20 128 ...
Страница 129: ... Curling Bot is ready completion 131 ...
Страница 133: ...MEMO 135 ...
Страница 142: ...Tip Tip Battery case X1 Double rivet X4 2s rivet X8 Step 11 Step 12 144 ...
Страница 146: ...Tip Tip 7 7 frame X1 2s rivet X6 2s rivet X4 Step 19 Step 20 Step17 148 ...
Страница 152: ...Tip 2s rivet X4 Step 31 Step 32 Smart servo ID00 Smart servo ID01 Smart servo ID03 Smart servo ID02 154 ...
Страница 153: ... Exploration Bot is ready completion Do not fold the solar light panel by force 155 ...
Страница 155: ...Take out the smart controller and connect the serial board then reassemble 157 ...
Страница 156: ...Tip Tip 2s rivet X4 Battery case X4 1 5 frame X1 Double rivet X4 Step 4 Step 5 158 ...
Страница 157: ...Step 6 Complete of an additional battery case for Exploration Bot completion 159 ...
Страница 161: ...MEMO 163 ...
Страница 165: ...Tip Tip 2s rivet X4 2 5 frame X2 2s rivet X6 Step 3 Step 4 167 ...
Страница 173: ...Tip Tip 2 15 frame X2 2s rivet X8 2s rivet X2 Step 17 Step 18 Step15 175 ...
Страница 180: ...Step 31 Tip Double rivet X2 Step 32 Smart servo ID00 Smart servo ID03 Smart servo ID02 Smart servo ID01 182 ...
Страница 183: ...Tip Serial board X1 Double rivet X2 Step 2 Step 3 185 ...
Страница 184: ... Complete of an additional battery case for Crane completion 186 ...
Страница 199: ...Tip Tip 2s rivet X2 1 12 frame X1 2s rivet X2 Step 25 Step 26 Step19 Smart servo ID03 Smart servo ID02 201 ...
Страница 200: ...Tip Tip 1 3 frame X1 1 5 frame X1 1 12 frame X1 2 5 frame X1 3s rivet X3 2s rivet X3 Step 27 Step 28 Step26 202 ...
Страница 205: ...Tip Battery case X1 Double rivet X2 Step 2 Step 3 207 ...
Страница 206: ...completion Complete of an additional battery case for Excavator 208 ...
Страница 214: ...Step 10 Take out 2s rivets Smart servo ID00 to the 12 o clock direction Tip 2 5 L frame X2 3s rivet X4 Step 11 216 ...
Страница 215: ...Step 12 Step 13 Disconnect smart servo ID00 Disconnect 3 6 L frame Take out 2s rivet Take out 3s rivet 217 ...
Страница 217: ...Tip Tip IR sensor X1 Double rivet X2 2s rivet X4 Step 16 Step 17 219 ...
Страница 220: ...Tip Tip 2s rivet X4 2s rivet X6 Step 22 Step 23 Step19 222 ...
Страница 222: ...Tip Tip 2s rivet X1 3s rivet X2 2 5 frame X1 Spacer X1 2s rivet X1 3s rivet X2 Step 26 Step 27 Step23 224 ...
Страница 225: ...Tip Tip Spacer X1 Small gear X1 2s rivet X4 3s rivet X1 2s rivet X4 Step 32 Step 33 Step27 227 ...
Страница 229: ...Tip Battery case X1 Double rivet X2 Step 2 231 ...
Страница 230: ... Complete of an additional battery case for Hu tank completion 232 ...
Страница 242: ...MEMO 244 ...
Страница 243: ...MEMO 245 ...







































































