


























16
Yaw Function
The two right-ward turning and the two left-ward turning propellers balance out the torques acting on the model. The
quadrocopter hovers stably.
If the control lever for the pitch and yaw function (also see figure 1, item 9) is moved to the left, the electronics in the
model will increase the speed of the propeller turning to the right (clockwise) viewed from above and at the same time
reduce the speed of the propellers turning to the left (counter-clockwise). This way, the entire lift force remains the
same, but only one torque acts on the model, which turns the quadrocopter around its vertical axis to the left when
viewed from above.
If the control lever is moved to the right, the speed changes of the propellers are precisely the other way around and
the model turns to the right.
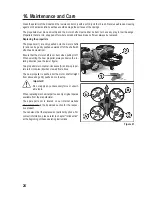
Figure 9
Roll Function
The roll function allows you to move your quadrocopter sideways to the right and to the left (see figure 10). Use the
right control lever for control (also see figure 1, item 4).
If the lever is slightly moved to the left, the electronics in the quadrocopter change the propeller speeds so that the
model will turn to the left slightly and thus also fly to the left.
If you move the transmitter to the right, the speed changes of the propellers are precisely inverted and the model will
fly sideways to the right.
Figure 10





























































