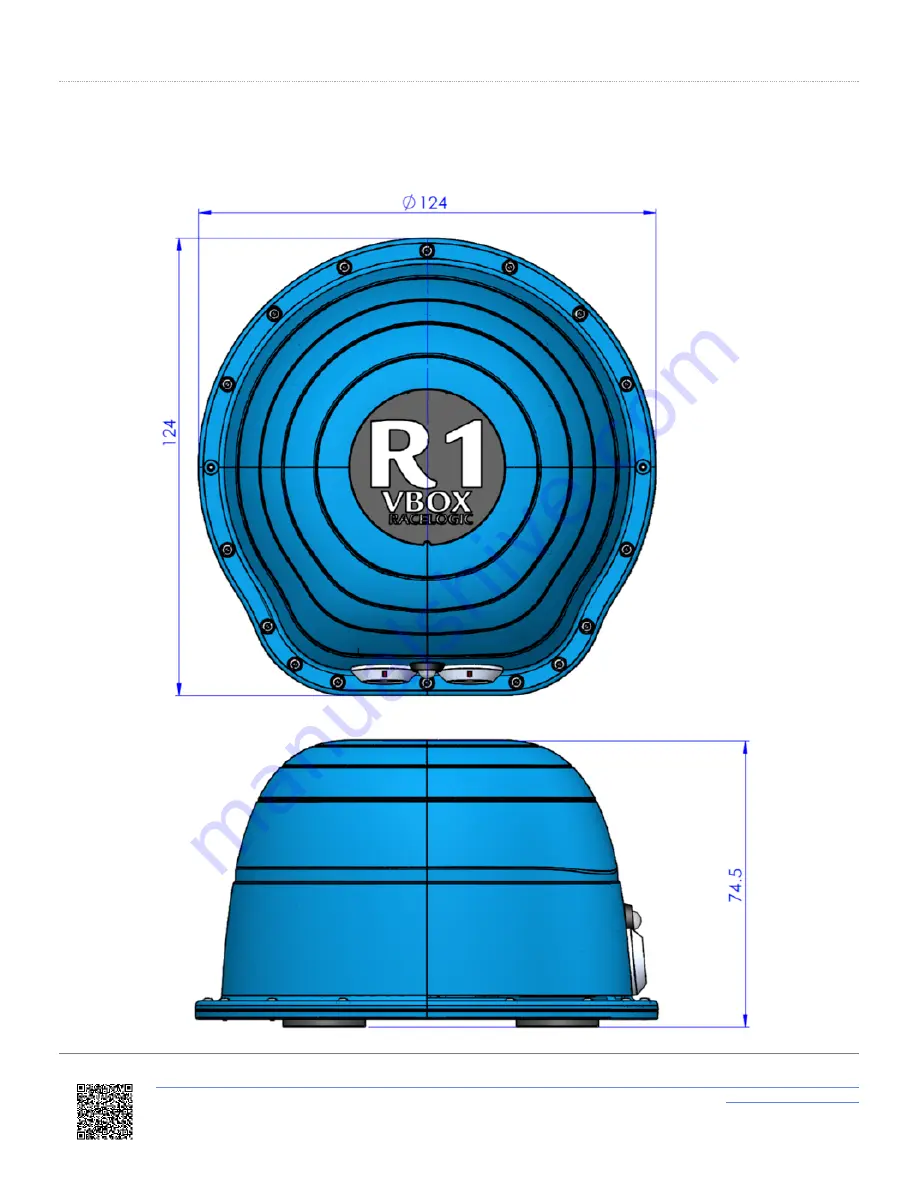
Beacon/Rover Dimensions
Measured in mm.
https://en.racelogic.support//VBOX_Indoor_Positioning_System_(VIPS)/VIPS_User_Guide/06_-_VIPS_Technical_Properties/VIPS_-
_Technical_Specification
32
Страница 1: ...ction 02 VIPS Hardware Installation 03 VIPS Rover Connection to VBOX 3i 04 VIPS Site Configuration Software Overview 05 VIPS Using with a VBOX 3i Standalone VIPS Regulatory Information VIPS CAN Output VIPS PIN OUTS VIPS Technical Specification 1 ...
Страница 2: ...integrated VBOX IMU04 Inertial Measurement Unit for precise pitch roll and yaw angular data It can also connect directly to an IMU04 enabled VBOX 3i enabling additional parameters from the vehicle s CAN bus to be logged Offering seamless integration between indoor and outdoor environments the system can be used for high dynamic applications and the rover will automatically connect to the nearest b...
Страница 3: ... simple configuration A minimum of 6 and maximum of 250 beacons can be installed in each location allowing continuous coverage of indoor spaces up to 3 5 km long Simple one time configuration either by Bluetooth or serial cable RS232 100 Hz update and low latency for high dynamic applications The rover automatically connects to the nearest beacons for optimum accuracy Each beacon is numbered for s...
Страница 4: ...ode Flashing Blue The unit is connected via an active Bluetooth link Solid Green The rover is in Stand alone Mode and receiving ranging data from at least 3 beacons Blinking Green The unit is looking for Beacons The unit is reading the site information The unit is set to beacon mode Flashing Green The rover cannot see at least 3 beacons Flashing Orange The unit is syncing the IMU Solid Orange The ...
Страница 5: ...mpute a solution For a simple installation Racelogic recommend placing the beacons in a Square formation with spacing between the beacons of around 25 30 m as below The beacons require a 9 36 V power source that is connected to the 2 way Lemo connector The other Lemo connector on the beacon is for Firmware upgrades and should be covered with the supplied splashproof plug to ensure waterproofness h...
Страница 6: ...ey Software The majority of the beacons should be as high up as possible however the area directly underneath the beacon in a small cone gives poor reception if the prism and metal disc are retained Some of the beacons 4 is a good number should be at a lower level so that there is good variation in geometry Opposite to what you might think It is much better to put the beacons as far away from the ...
Страница 7: ...ximum number of beacons available to a solution 12 should be utilised within line of sight to the receiver Suitable Beacon Orientations Side by side https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 02_ _VIPS_Hardware_Installation 7 ...
Страница 8: ...de by side with large height difference tops towards each other Side by side with large height difference Tops together Tops to base https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 02_ _VIPS_Hardware_Installation 8 ...
Страница 9: ...n a vehicle this is usually towards the rear just in front of the rear windshield The rover should be mounted in a way such that it has a clear view to the beacons and away from any objects that may block that view roof bars radio antennas etc Make sure there is no metal close to the receiver even a metal clamp close to the bottom of the receiver or a monitor in the line of sight to beacons can ca...
Страница 10: ... the VBOX 3i does not have a GNSS antenna connected If the VBOX receives a satellite signal even a poor one the timing will change from the internal clock to GNSS time causing the VIPS system to fail the VBOX 3i will function the same as when using GNSS in terms of CAN In Out data logging analogue etc and VBOX Test Suite use When indoor outdoor operation is selected the VIPS system will wait for G...
Страница 11: ... 7 way Lemo connector in to the right hand connector on the Rover Connect the 25 way connector to the A IN port on the VBOX 3i Connect the 5 way Lemo connector to the SER port on the VBOX 3i https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 03_ _VIPS_Rover_Connection_to_VBOX_3i 11 ...
Страница 12: ... the 25 way connector to the A IN port on the VBOX 3i Connect the 5 way Lemo connector to the SER port on the VBOX 3i Insert the 6 way Lemo connector in to the left hand connector on the Rover Insert the other end of the cable in to the CAN KF port on the IMU04 https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 03_ _VIPS_Rover_Connection_to_VBOX_3i 12 ...
Страница 13: ...the user using the VIPS Site Configuration Software Getting Started On opening you are presented with the Files menu which gives the option to load a previously saved site configuration JSON file or create a new configuration On this screen you can also choose to save the current settings By selecting New or a previously saved configuration file you are then presented with options necessary for co...
Страница 14: ...e will overwrite the current file Alternatively you can use the dropdown menu beneath the Save button and select Save as to save the configuration with a different filename Menu Side Bar The software is navigated by using the menu buttons on the left hand side of the window Menus include Files Site Beacons Ping Table Map and Upload The Map menu will display the beacon locations https en racelogic ...
Страница 15: ...e used as well as the x y z distances to the origin Ping Table View the expected order the Rover will receive the Ping signals from the beacons Upload Upload the site information to the Rover or the Beacons https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 04_ _VIPS_Site_Configuration_Software_Overview 15 ...
Страница 16: ...y connecting the Rover unit via serial connection In this mode you can enable the VIPS built in Kalman filter from the site configuration software By default there is no Kalman filtering of the data making the output data more noisy than the VBOX solution Site ID When a rover powers up it searches for beacons Once 1 or more beacons are found it queries the closest beacon for its site ID and the ch...
Страница 17: ...the conversion to latitude longitude is skipped and the VIPS rover will output in meters X Y When operating with a VB3i an origin is always needed when operating in standalone mode this is optional https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 05_ _VIPS_Using_with_a_VBOX_3i 2F 2FStandalone 17 ...
Страница 18: ... exempt RSS standard s Operation is subject to the following two conditions 1 this device may not cause interference and 2 this device must accept any interference including interference that may cause undesired operation of the device Le présent appareil est conforme aux CNR d Industrie Canada applicables aux appareils radio exempts de licence L exploitation est autorisée aux deux conditions suiv...
Страница 19: ...ny other antenna or transmitter Le dispositif a été jugé conforme aux exigences énoncées dans les articles 47 CFR 2 1091 et Industrie Canada RSS 102 pour un environnement non contrôle L antenne s utilisée pour ce transmetteur doit etre installé pour fournir une distance de séparation d au moins 20 cm de toutes les personnes et ne doit pas être co localisés ou fonctionner en conjunction avec une au...
Страница 20: ...lue in metres or latitude in degrees 3 Altitude 0 01 m per bit 4 Velocity 0 01 kts per bit 5 Heading 0 01 per bit 6 Beacons and Flags When position is in meters then a heading of 0 indicates the Y direction a heading of 90 indicates the X direction Beacons and Flags byte https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _CAN_Output...
Страница 21: ...idence level for X and Y 1 Position residual 0 2 Position residual is not 1 0 Vertical position good is set when all of the following conditions are met Horizontal position is good Confidence level for Z is not 1 Velocity good is set when all of the following conditions are met Beacon count 5 Velocity residual 1 Velocity residual is not 1 https en racelogic support VBOX_Indoor_Positioning_System_ ...
Страница 22: ...VIPS PIN OUTS Beacon Beacon front view https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _PIN_OUTS 22 ...
Страница 23: ... I 12 V Power 2 I Ground Connector 2 Lemo 7 PIN PIN I O Function 1 N A N C 2 N A N C 3 I VIPS Rx 4 O VIPS Tx 5 N A N C https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _PIN_OUTS 23 ...
Страница 24: ...6 I 12 V Power 7 I Ground Chassis I Shield Rover Rover front view Connector 1 Lemo 6 PIN https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _PIN_OUTS 24 ...
Страница 25: ... V Power 6 I O PPS Chassis I Ground Connector 2 Lemo 7 PIN PIN I O Function 1 I IMU Rx 2 O IMU Tx 3 I VIPS Rx 4 O VIPS Tx 5 I O PPS 6 I 12 V Power 7 I Ground https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _PIN_OUTS 25 ...
Страница 26: ...PIN I O Function Chassis I Shield https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _PIN_OUTS 26 ...
Страница 27: ...te rate 100 Hz Maximum velocity 300 km h Minimum velocity 0 1 km h Resolution 0 01 km h Latency 60 ms Relative Positioning Horizontal accuracy 5 cm 95 CEP Update rate 100 Hz Height accuracy 1 m 95 CEP Absolute position 10 cm 95 CEP https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _Technical_Specification 27 ...
Страница 28: ...0 Hz Heading Resolution 0 01 Update rate 100 Hz Accuracy VB3i Kalman Filtered 0 1 95 confidence at 60 km h Accuracy Standalone VIPS 0 4 95 confidence at 60 km h Time Resolution 0 01 s Accuracy 30 ns https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _Technical_Specification 28 ...
Страница 29: ...distance Subject to accurate site survey and installation UWB Radio Frequency 3 64 4 38 GHz or 6 16 6 69 GHz Transmit power peak average 0 dBm 41 3 dBm Outputs Rover RS232 Output RS232 Port 1 Position and velocity RS232 Port 2 IMU04 data Output data rate 100 Hz https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _Technical_Specificat...
Страница 30: ...232 Port 1 Configuration only Inputs Rover Unit Power Input voltage range 6 5 30 V DC Power consumption 3 W Digital Input Input Function 1 PPS https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _Technical_Specification 30 ...
Страница 31: ...Bandwidth 50 Hz 50 Hz Noise density 0 01 s Hz 60 µg Hz Bias stability 0 003 s 15 µg Bias repeatability 1 year 0 2 s 0 005 g Environmental and Physical IP rating IP 67 Operating temperature 30 C to 60 C Storage temperature 40 C to 85 C Size of each beacon rover 124 x 124 x 74 5 mm l x w x h Weight of each beacon rover 350 g https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_G...
Страница 32: ...Beacon Rover Dimensions Measured in mm https en racelogic support VBOX_Indoor_Positioning_System_ VIPS VIPS_User_Guide 06_ _VIPS_Technical_Properties VIPS_ _Technical_Specification 32 ...