













84
6
7
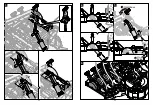
操縱桿
5
將操縱桿
5
往前推以舉起物件
將操縱桿
1
推到中間位置以鬆開吸盤
Lever Controller
5
Push "Lever Controller 5 " forward to lift the object.
Set " Lever Controller 1" in the middle to release object.
85
8
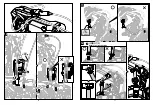
平台
物件
Tip: Put the object under a slightly higher/and smoother platform, it may help you practice the
"Suction mode" with greater success.
將物件放在一個稍微高一點且平整的平台上,可協助您在練習
”
吸盤模式
”
時得到比較好的成效。
Platform
Object
Содержание GE-632
Страница 1: ...GE 632 Hydraulic Robot Arm...
Страница 6: ...8 3 P2 1 1 9 P2 4 5 1 2 1 2 E16 G6 1 1...
Страница 8: ...12 10 1 2 E25 F4 Control Base Stand 13 F7 D5 G16 1 2 3 P2 P1 E14 C18 F3 Main Body Assembly 1 1 1 1...
Страница 9: ...14 4 D2 D3 P2 P2 5 E13 180 1 1 15 6 7 P2 C9 G10 D4 P2x2 1 1 2 E26 Forearm Wrist...
Страница 17: ...30 E20 12 14 13 2 2 1 1 P8 C19 Side View PUSH PUSH 31 A7 1 1 2 15...
Страница 28: ...52 3 2 3 1 click click click click Push 53 4 5 6 1 2 H0 3 PUSH PULL Cylinder PUSH PUSH...
Страница 31: ...58 3 2 1 3 click click click click PUSH PUSH 59 4 5 6 1 2 3 PUSH PULL PUSH PUSH...
Страница 34: ...64 3 2 3 1 Click Click Push 65 5 4 6 1 2 3 PUSH PULL PUSH...
Страница 35: ...66 1 2 1 Robot Arm Module Assembly Cylinder 2 Cylinder 67 3 4 5 Marking Marking Marking Marking...
Страница 37: ...70 10 1 2 Marking 71 2 1 11 12 4 3 Cylinder Ensure the right direction...
Страница 38: ...72 13 14 1 2 3 C8 Marking Marking 73 15 16 5 PUSH 5 Cylinder Lever Controller 5 PUSH PUSH PUSH PUSH...







































































