





























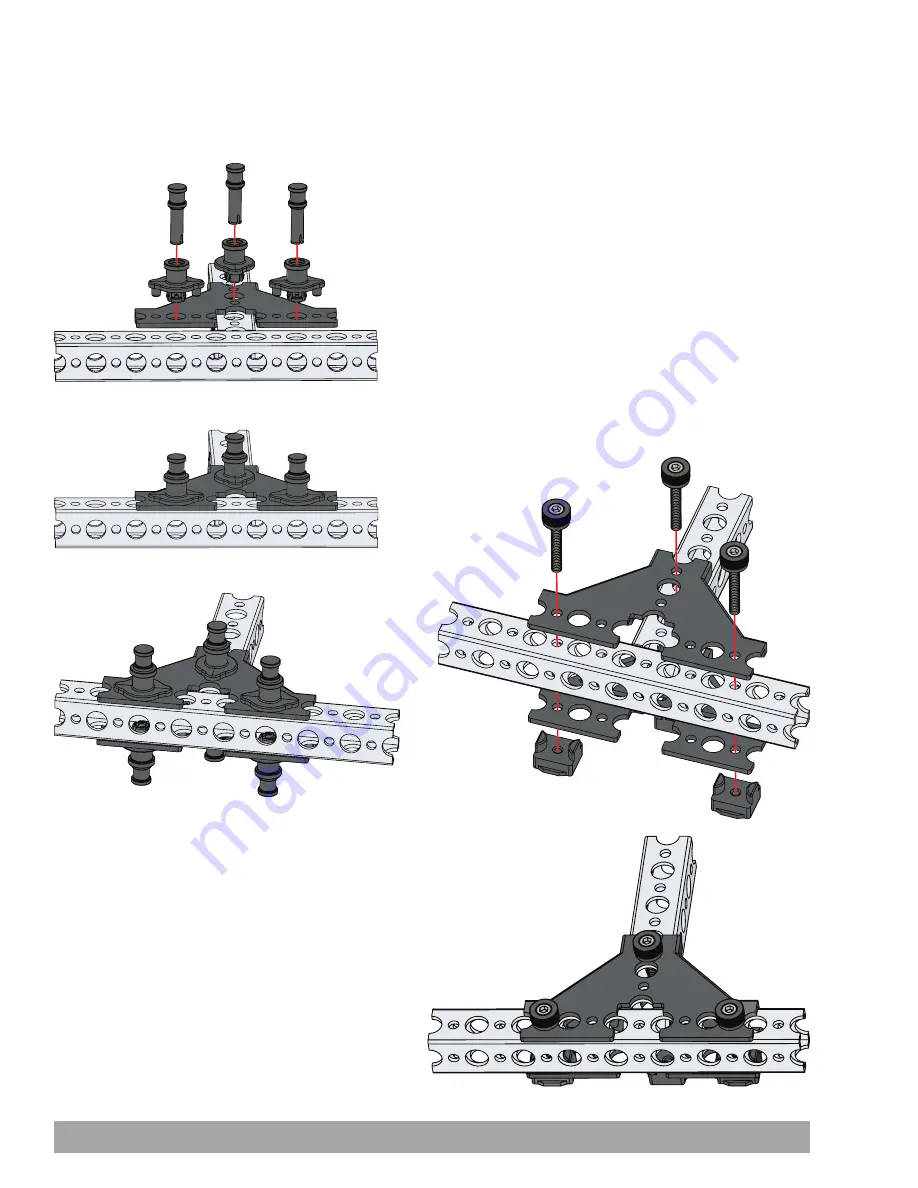
Brackets can also be used to connect beams. Brackets are available for a tee connection, 60-degree connection, or
90-degree connection. Brackets should be used in pairs, with two brackets on opposite sides of a beam. Brackets are
secured using quick rivets and pegs or thumbscrews and wing nuts.
64
Building and Coding the PULSE CodeeBot
Содержание tetrix prime
Страница 1: ...44301 TETRIX PULSE Robotics Controller Programming Guide...
Страница 7: ...PULSE Controller Technology Overview Getting Started 5...
Страница 60: ...Step 5 Step 6 Step 7 Step 8 Step 3 Step 4 Servo Horn Screw 58 Building and Coding the PULSE CodeeBot...
Страница 61: ...Step 9 Step 10 Step 12 Step 14 Step 11 Step 13 Building and Coding the PULSE CodeeBot 59...
Страница 62: ...Step 18 Step 17 Finished Assembly Step 16 Step 15 60 Building and Coding the PULSE CodeeBot...
Страница 73: ...Step 1 0 Step 1 1 Build two like this Building and Coding the PULSE CodeeBot 71...
Страница 74: ...Step 1 2 Step 1 3 72 Building and Coding the PULSE CodeeBot...
Страница 75: ...Step 1 4 Building and Coding the PULSE CodeeBot 73...
Страница 77: ...Partial assembly should look like this Step 2 0 Step 2 1 Building and Coding the PULSE CodeeBot 75...
Страница 78: ...Step 2 2 Step 2 3 76 Building and Coding the PULSE CodeeBot...
Страница 79: ...Step 2 4 Step 2 5 Building and Coding the PULSE CodeeBot 77...
Страница 80: ...Step 2 6 Step 2 7 78 Building and Coding the PULSE CodeeBot...
Страница 81: ...Step 2 8 Building and Coding the PULSE CodeeBot 79...
Страница 83: ...Step 3 0 Step 3 1 Building and Coding the PULSE CodeeBot 81...
Страница 84: ...Step 3 2 82 Building and Coding the PULSE CodeeBot...
Страница 85: ...Step 3 3 Building and Coding the PULSE CodeeBot 83...
Страница 87: ...Step 4 0 Step 4 1 Building and Coding the PULSE CodeeBot 85...
Страница 88: ...Step 4 2 86 Building and Coding the PULSE CodeeBot...
Страница 89: ...Finished assembly should look like this Building and Coding the PULSE CodeeBot 87...
Страница 131: ...GS Activity 4 extension GS Activity 5 extension Appendix 129...
Страница 144: ...142 Notes...
Страница 145: ......
Страница 146: ...Call Toll Free 800 835 0686 Visit Us Online at TETRIXrobotics com TETRIX PULSE Robotics Controller Programming Guide...







































































