





























Parker Hannifin Corporation – UTS User Manual
11
7
CAN Information
SAE J1939
The J1939 standards come from the international Society of Automotive Engineers (SAE) and were developed to
provide a standard architecture by which multiple electronic systems on a vehicle can communicate. J1939 has
been implemented in a broad range of vehicles and transportation systems and provides a reliable
communication protocol over a high-speed CAN network.
The UTS uses this protocol to transmit its condition as a predefined set of outputs. All messages are SAE J1939
Proprietary B PGN's except the address claim request and response.
Identifier Description
The J1939 protocol uses a 29-bit identifier. The 29-bit identifier is built up as follows:
•
Bit 0-7 is Source Address (
SA
)
•
Bit 8-23 is Parameter Group Number (
PGN
)
•
Bit 24 is Data Page (
DP
)
•
Bit 25 is Reserved (
R
)
•
Bit 26-28 is Priority (
P
)
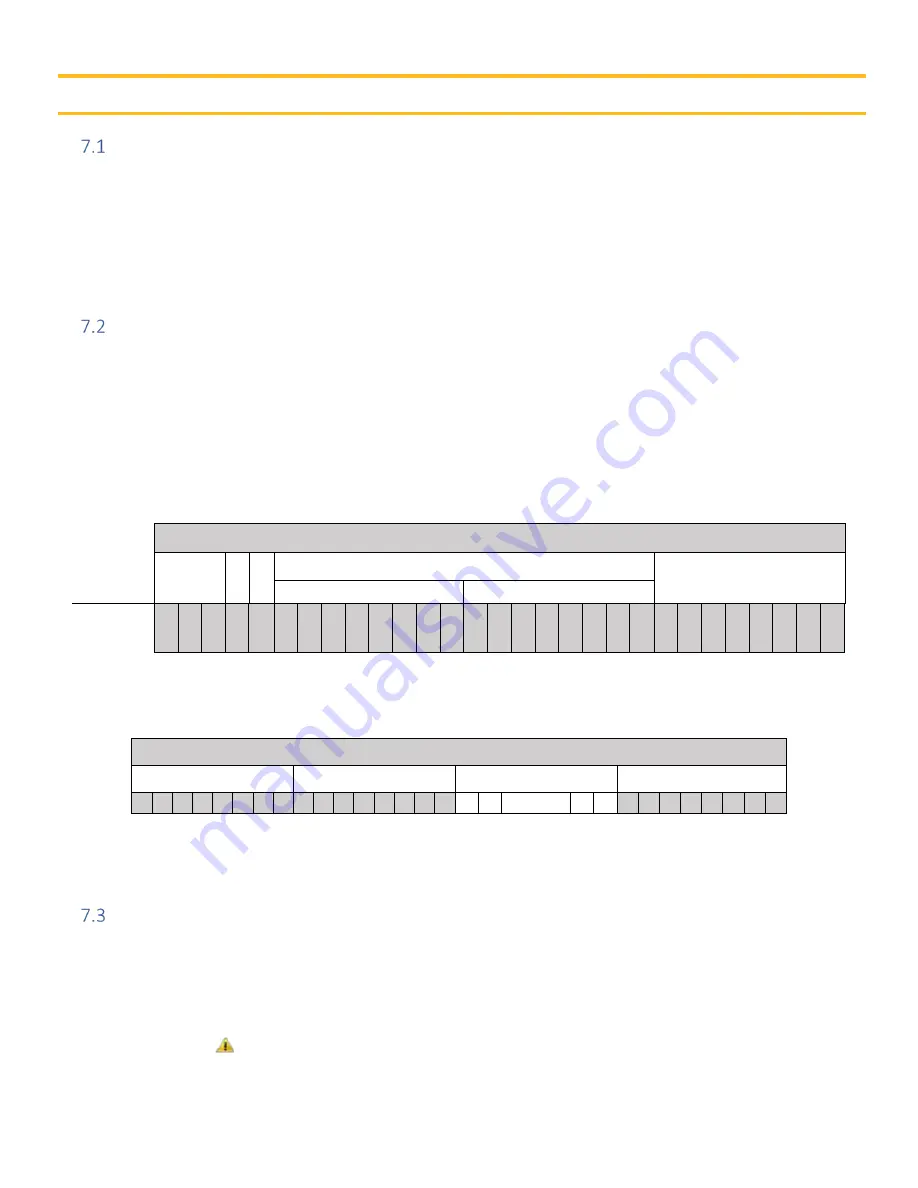
Table 7.2.1: J1939 CAN Identifier Structure
29-bit IDENTIFIER
P
riority
R DP
P
arameter
G
roup
N
umber
S
ource
A
ddress
PDU Format
PDU Specific
CAN 29 Bit
ID Position 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Each identifier has an associated 8-byte data field. The data field is built up as shown in Table 7.2.2.
Table 7.2.2: The Data Field Structure
DATA FIELD
BYTE 1
BYTE 2
BYTE 3-7
BYTE 8
7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6
…
1 0 7 6 5 4 3 2 1 0
The Data Field is structured as Little Endian within the bytes, and Big Endian for the Data Field. This is visualized
in Table 7.2.2 above.
UTS Communications
The UTS uses two communication message types: Global and Specific Address.
o
Global Message:
This is the operational “Broadcast mode” message for all the axis tilt information on the
sensor. In these messages the unit broadcasts the outgoing data (status of each axis) on the J1939 bus.
o
Specific Address Message:
This is the “Service mode” message for the sensor. In these messages the UTS
receives write and query messages to its node address from the J1939 bus.
Ensure there is no loss of power while making programming changes with the UTS in service
mode