













2 Functional overview
2
Functional overview
Auto-tuning is required for all applications to adjust the servo motor to the specific
mechanical conditions. You can choose one of the following auto-tuning functions:
• Fit-gain tuning
• Real-time auto-gain tuning
This
Quick Start Guide
explains how to perform real-time auto-gain tuning.
While the fit-gain tuning function guides you through an automatic fine-tuning process, real-
time auto-gain tuning mainly adjusts the rigidity of the machine. If you are using a MINAS
A6 servo driver, first try fit-gain tuning. If fit-gain tuning was not successful, perform real-time
auto-gain tuning. Both methods can be executed using PANATERM.
If possible, you should perform real-time auto gain-tuning on the machine with the servo
motor and the mechanical loads connected and with the actual movements.
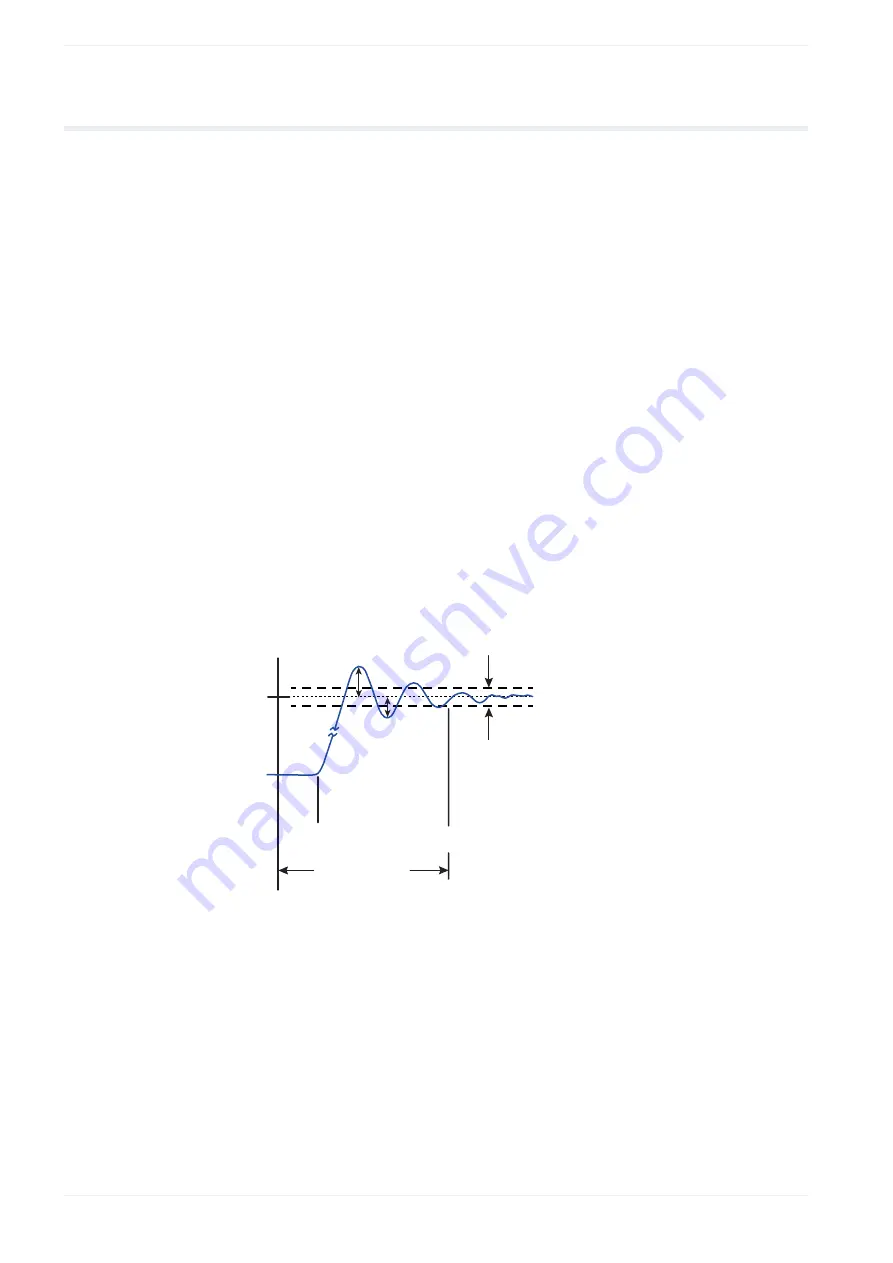
Usually, auto-tuning has the following goals:
1. Reduce the settling time to reduce cycle times.
2. Reduce mechanical vibration to increase the life time of the machine.
3. Reduce overshoot and undershoot to reach the target position within the allowed
hysteresis.
4. Decrease the response time to reach the target position faster.
t
2
t
3
t
1
Settling time
Hysteresis
Overshoot
Undershoot
Target
value
Overshoot, undershoot, and settling time of the position value
Example
A MINAS A6SF servo driver is connected to a servo motor, which is coupled to a belt. The
control mode is position control. A continuous movement within the mechanical limits, no
mechanical vibration, no overshoot or undershoot, and a reduced settling time are required.
6
QS5001_V1.0_EN





















































