



























No. SX-DSV02829 -
81-
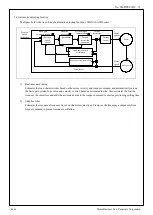
5-1-2 Adaptive filter
This function estimates the resonance frequency from the vibrating component which appears on the motor velocity,
and removes the resonance component from the torque command with adaptive filter, thus reduces the resonance
vibration.
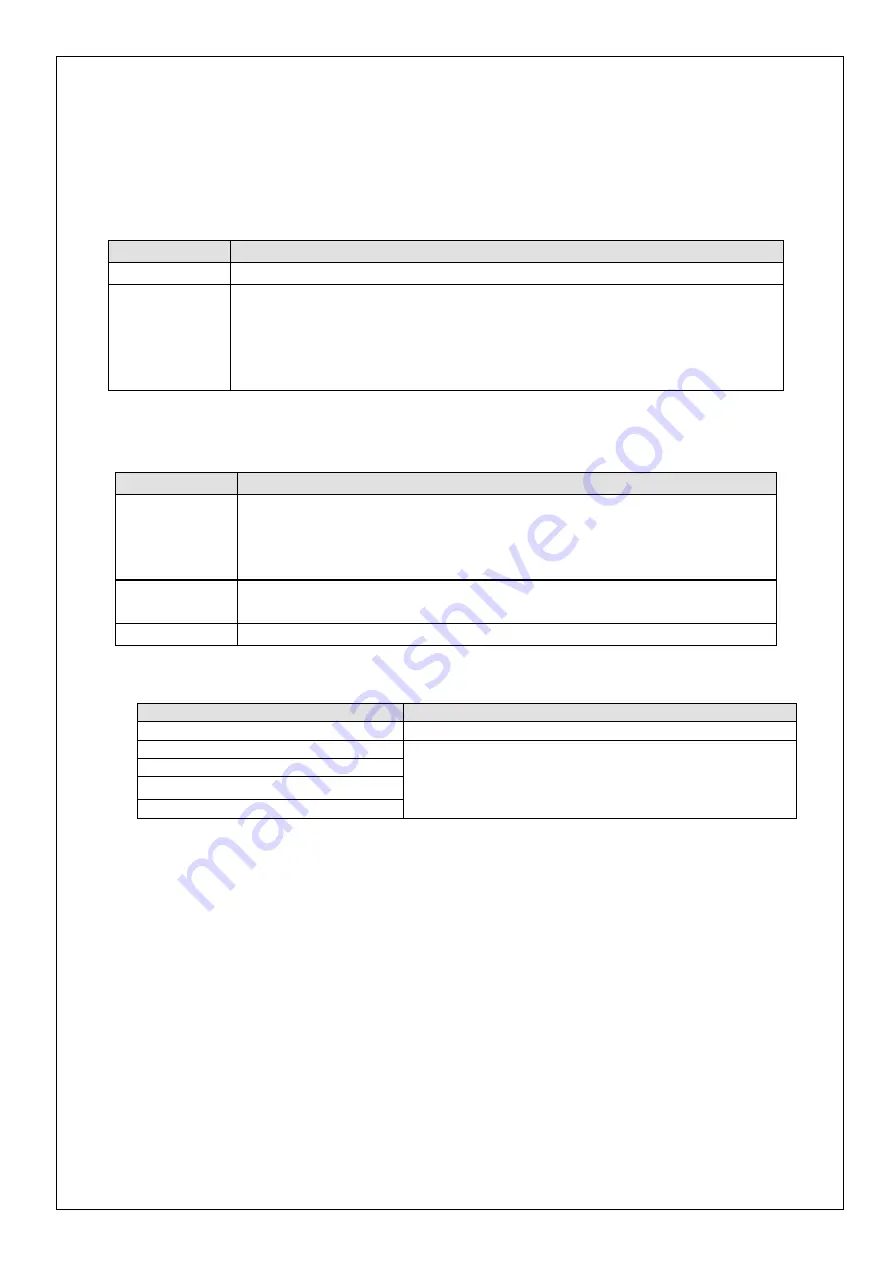
1)
Applicable Range
This function works under the following condition.
Conditions under which the Adaptive filter is activated
Control mode
Applies to other control modes than torque control.
Others
• Should be servo-on status.
• Elements other than control parameters, such as deviation counter clear command inhibit
and torque limit are appropriately set, enabling the motor to operate normally.
• No adaptive operation is performed during the execution of magnet pole position
estimation.
2)
Caution
In the following condition, normal operation may not be expected–manually set the notch filter to prevent
resonance.
Conditions which obstruct adaptive filter action
Resonance point
• Resonance frequency is lower than the velocity response frequency
×
3 (Hz).
• Resonance peak is low, or control gain is low where the motor velocity is not affected
by this.
• Three or more resonance points exist.
Load
• Motor velocity variation with high harmonic component is generated due to non-linear
factors such as backlash.
Command
• Acceleration/deceleration is rapid such as 30000 [r/min] per 1 [s].
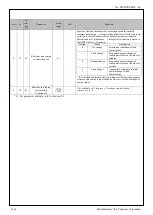
3) Limitation
The MINAS-A5BL series has the following limitations.
Cycle time(communication cycle)
Limitation
25
0μs
Use of adaptive filter not allowed
500μs
One adaptive filter allowed as the number of valid ones
Do not set Pr2.00 “Adaptive filter mode setup” to “2” (2 filters
are valid).
1000μs
2000μs
4000μs
R1.00
Motor Business Unit, Panasonic Corporation







































































