




























No. SX-DSV02829 -
40-
4-2-3 Positional command filtering function
To smooth the positional command processed by the electronic gear, set the command filter.
■Parameters
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
2
22
B
Positional
command
smoothing filter
0–10000
0.1 ms
Set up the time constant of the 1st delay filter in response to the
positional command.
Set to the time constant of the command response filter for 2 degrees
of freedom control. The maximum value is 2000 (=200.0ms).
For details , refer to ”Section 5-2-14”.
2
23
B
Positional
command FIR
filter
0–10000
0.1 ms
Set up the time constant of the FIR filter in response to the
positional command
*1) For parameter attribute, refer to Section 9-1.
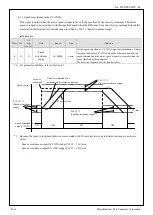
• Pr 2.22 Positional command smoothing filter
When a square wave command for the target speed Vc is applied, set up the time constant of the 1st delay filter as shown
below.
Set the time constant for the command filter during 2 degrees of freedom control. For details, refer to Section 5-2-14.
*1 Actual filter time constant (setup value
×
0.1 ms) has the maximum absolute error of 0.4 ms for a time constant below
100 ms and the maximum relative error of 0.2% for a time constant 20 ms or more.
*2 Switching of Pr 2.22 Positional command smoothing filter is performed on the rising edge of the command with the
number of command pulses/0.166 ms is changed from 0 to a value other than 0 while the positioning complete is
being output.
Even if the control mode is changed to position control after Pr2.22 (Positional command smoothing filter) setting is
changed during velocity control or Torque control, the setting is not changed.
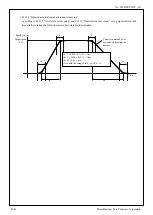
If the filter time constant is decreased and positioning complete range is increased, and a many number of pulses are
accumulated in the filter (the area equivalent of “value of positional command before filter–value of positional
command after filter” integrated over the time), at the time of switching, these pulses are discharged at a higher rate,
causing the motor to return to the previous position—the motor runs at a speed higher than the command speed for a
short time.
*3 Even if setting of Pr2.22 (Positional command smoothing filter) is changed, it is not immediately applied to the
internal calculation. If the switching as described in *2 occurs during this delay time, the change of Pr2.22 will be
suspended.
Speed
[r/min]
Vc
Vc
×
0.632
*1
Positional command smoothing filter setup
time [ms] (Pr 2.22
×
0.1 ms)
Vc
×
0.368
*1
Time
Positional
command before
filter
Positional command
after filter
Filter switching
waiting time *2
R1.00
Motor Business Unit, Panasonic Corporation







































































