Oxford Technical Solutions
18
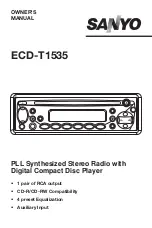
OxTS NED navigation frame
Figure 4.
OxTS navigation frame
The OxTS navigation frame is attached to the IMU frame origin but does not rotate with it. The down axis is
always aligned to the gravity vector and north always points north.
The OxTS navigation frame uses an earth-fixed, earth-centred reference frame, and employs
a NED (north, east, down) orientation. It is shown in Figure 4. The down axis is always
aligned to the gravity vector, while the north axis always points north. As long as the
displaced output function in NAVconfig is not enabled, the OxTS navigation frame is centred
on the IMU frame origin.
Table 8.
OxTS navigation frame definition
Axis
Description
North
The north axis (N) is perpendicular to the gravity vector and in the direction of the north
pole along the earth's surface
East
The east axis (E) is perpendicular to gravity, perpendicular to the north axis and is in the
east direction
Down
The down axis (D) is along the gravity vector
Содержание RT1003
Страница 1: ...Confidently Accurately User Manual RT1003 GNSS aided inertial navigation system ...
Страница 108: ...Confidential Information Oxford Technical Solutions ...
Страница 110: ......