NCV7341
http://onsemi.com
7
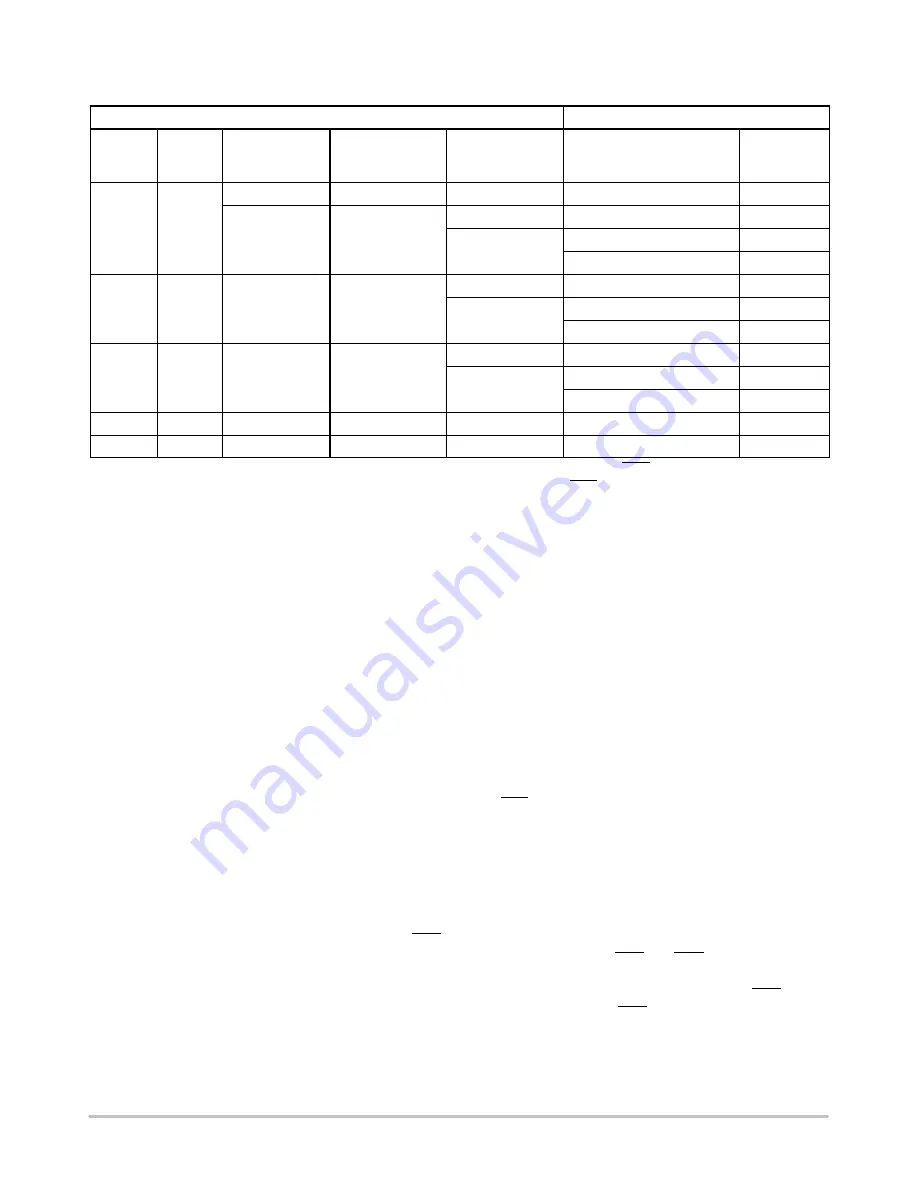
Table 3. OPERATION MODES
Conditions
Transceiver Behavior
Pin STB
Pin EN
V
CC
/V
IO
Undervoltage
Flag
VBAT
Undervoltage
Flag
Power
−
up or
Wakeup Flag
Operating Mode
Pin INH
X
X
Set
X
X
Sleep
Floating
Reset
Set
Set
Standby
High
Reset
If in sleep, then no change
Floating
otherwise stand
−
by
High
Low
Low
Reset
Reset
Set
Stand
−
by
High
Reset
If in sleep, then no change
Floating
otherwise stand
−
by
High
Low
High
Reset
Reset
Set
Stand
−
by
High
Reset
If in sleep, then no change
Floating
otherwise go
−
to
−
sleep
High
High
Low
Reset
Reset
X
Receive
−
only
High
High
High
Reset
Reset
X
Normal
High
Normal Mode
In Normal mode, the transceiver is able to communicate
via the bus lines. The CAN controller can transmit data to the
bus via TxD pin and receive data from the bus via Pin RxD.
The bus lines (CANH and CANL) are internally biased to
V
CC
/2 via the common
−
mode input resistance. Pin V
SPLIT
is also providing voltage V
CC
/2 which can be further used
to externally stabilize the common mode voltage of the bus
– see Figure 2 and Figure 3. Pin INH is active (pulled high)
so that the external regulators controlled by INH Pin are
switched on.
Receive
−
Only Mode
In Receive
−
only mode, the CAN transmitter is disabled.
The CAN controller can still receive data from the bus via
RxD Pin as the receiver part remains active. Equally to
normal mode, the bus lines (CANH and CANL) are
internally biased to V
CC
/2 and Pin V
SPLIT
is providing
voltage V
CC
/2. Pin INH is also active (pulled high).
Standby Mode
Standby mode is a low
−
power mode. Both the transmitter
and the receiver are disabled and a very low
−
power
differential receiver monitors the CAN bus activity. Bus
lines are biased internally to ground via the common mode
input resistance and Pin V
SPLIT
is high
−
impedant (floating).
A wake
−
up event can be detected either on the CAN bus or
on the WAKE Pin. A valid wake
−
up is signaled on pins ERR
and RxD. Pin INH remains active (pulled high) so that the
external regulators controlled by INH Pin are switched on.
Go
−
To
−
Sleep Mode
Go
−
To
−
Sleep mode is an intermediate state used to put the
transceiver into sleep mode in a controlled way.
Go
−
To
−
Sleep mode is entered when the CAN controller
puts pin EN to High and STB Pin to Low. If the logical state
of Pins EN and STB is kept unchanged for minimum period
of t
h(min)
and neither a wake
−
up nor a power
−
up event occur
during this time, the transceiver enters sleep mode. While in
go
−
to
−
sleep mode, the transceiver behaves identically to
stand
−
by mode.
Sleep Mode
Sleep mode is a low
−
power mode in which the
consumption is further reduced compared to stand
−
by
mode. Sleep mode can be entered via go
−
to
−
sleep mode or
in case an undervoltage on either V
CC
or V
IO
occurs for
longer than the under
−
voltage detection time. The
transceiver behaves identically to standby mode, but the
INH Pin is deactivated (left floating) and the external
regulators controlled by INH Pin are switched off. In this
way, the V
BAT
consumption is reduced to a minimum. The
device will leave sleep mode either by a wake
−
up event (in
case of a CAN bus wake
−
up or via Pin WAKE) or by putting
Pin STB high (as long as an under
−
voltage on V
CC
or V
IO
is not detected).
Internal Flags
The transceiver keeps several internal flags reflecting
conditions and events encountered during its operation.
Some flags influence the operation mode of the transceiver
(see Figure 5 and Table 3). Beside the undervoltage and the
TxD dominant timeout flags, all others can be read by the
CAN controller on Pin ERR. Pin ERR signals internal flags
depending on the operation mode of the transceiver. An
overview of the flags and their visibility on Pin ERR is given
in Table 4. Because the ERR Pin uses negative logic, it will
be pulled low if the signaled flag is set and will be pulled
high if the signaled flag is reset.