





























Chapter 3: Robot Installation
Figure 3-6. EtherCAT Node ID 0 Switch Setting
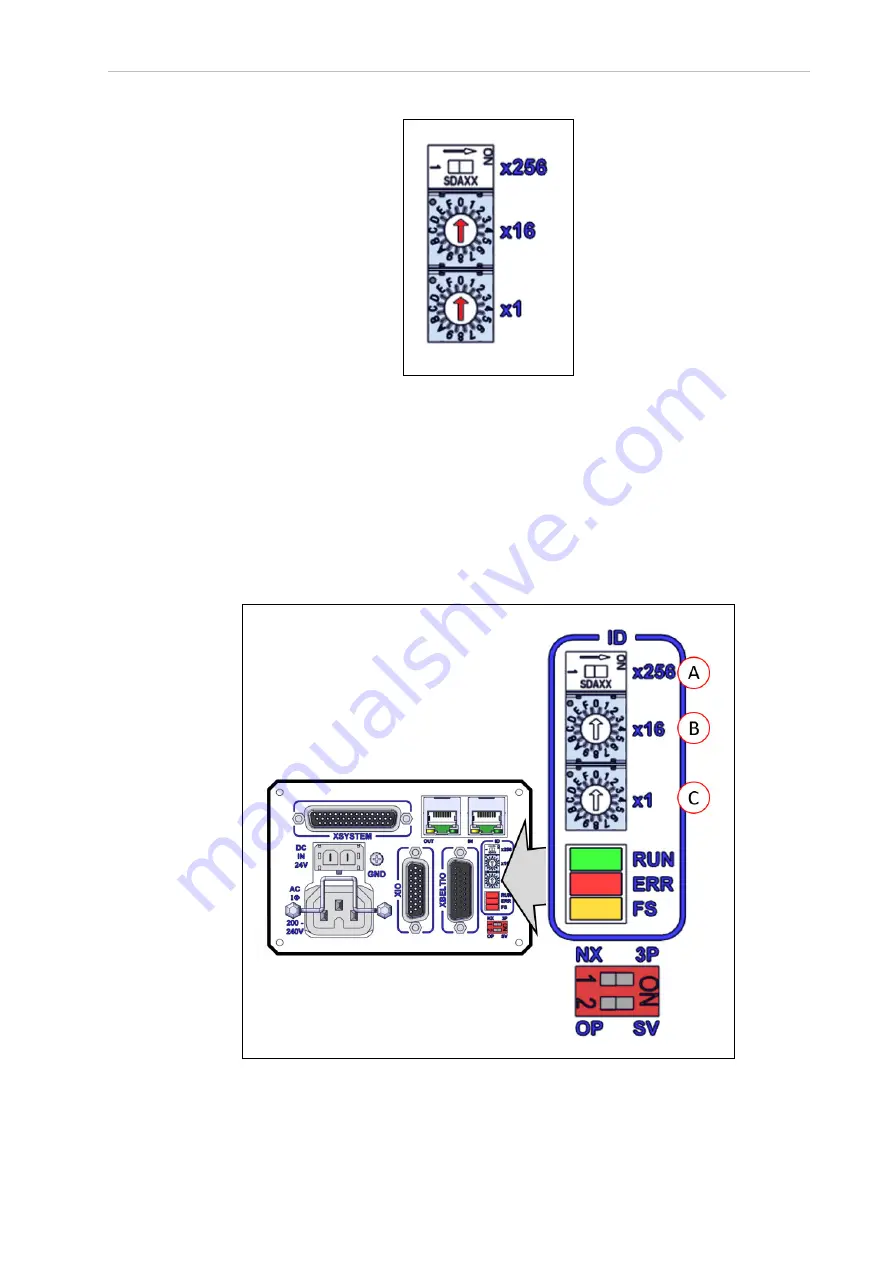
Setting the EtherCAT Node ID Using Hardware Switches
The eCS-ECAT interface panel has three physical switches that can be used for setting
the EtherCAT node ID (address) as described in the figure below.
The switch settings are checked when 24 VDC power is applied to the eCS-ECAT.
IMPORTANT:
Turn OFF AC and DC power before changing EtherCAT node ID
switches.
Figure 3-7. eCS-ECAT Interface Panel EtherCAT ID Switches
21861-000 Rev A
Viper 650 and 850 Robot with EtherCAT
51



































































