



























CHAPTER
2
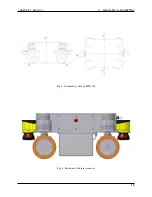
MPO-700
The omnidirectional MPO-700 is the ideal base for high-end service robots. Its four
(page 42) en-
able it to move extremely smoothly into any direction. This robot is even capable of rotating freely while driving to its
destination. The Omni Drive Modules of the MPO-700 feature important benefits compared to other omnidirectional
drive kinematics, like for example the MPO-500’s Mecanum wheels.
• Fully omnidirectional manoeuvrability
• Very steady movements
• High stability and payload
• Compact, easily integrated drive units
This makes the MPO-700 a premium alternative for applications that require omnidirectional movements without the
limitations of traditional kinematics.
2
https://neobotix-docs.de/hardware/en/MPO-700.pdf
9
Содержание MMO-700
Страница 1: ...MMO 700 Neobotix GmbH Apr 14 2022 ...
Страница 11: ...CHAPTER 1 MMO 700 1 6 TRANSPORT Fig 3 Position of the auxiliary batteries and battery connectors 7 ...
Страница 33: ...CHAPTER 3 GENERAL HARDWARE INFORMATION 3 4 CHARGING STATIONS Fig 2 Position of the main power switch X 29 ...
Страница 52: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 1 Dimensions of the Omni Drive Module 48 ...
Страница 53: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 2 Bottom view of the Omni Drive Module 49 ...
Страница 54: ...CHAPTER 4 OMNI DRIVE MODULE 4 4 ELECTRICAL INSTALLATION Fig 3 Top view of the Omni Drive Module 50 ...







































































