

















LA000507G © 2006 Navman New Zealand. All rights reserved. Proprietary information and specifications subject to change without notice.
3.10 Dynamic constraints
The Jupiter 20 receiver is programmed to deliberately lose track if any of the following limits are
exceeded:
Velocity: 500 m/s max
Acceleration: 4 G (39.2 m/s
2
) max
Vehicle jerk: 5 m/s
3
max
Altitude: 18 000 m max (referenced to MSL)
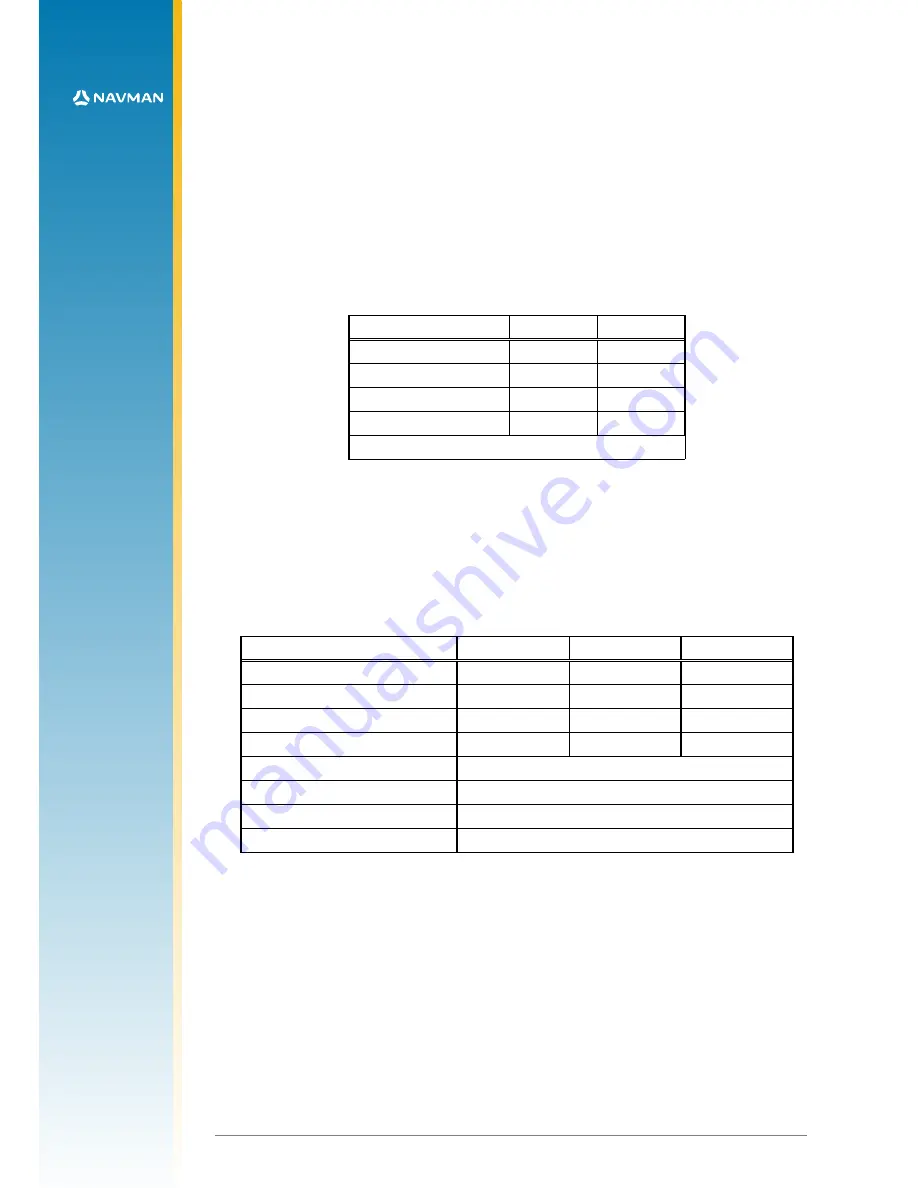
3.11 Position and velocity accuracy
The position and velocity accuracy of the Jupiter 20 are shown in Table 3‑4, assuming full
accuracy C/A code (Clear/Acquisition). These values are the same in normal operation and
when TricklePower is active.
Parameter
J20/J20D
J20S
horizontal CEP
2.1 m
2.2 m
horizontal (2 dRMS)
5.2 m
5.5 m
vertical VEP
2.5 m
2.5 m
velocity 2D (2 sigma)*
0.1
m/s
0.15
m/s
*at a velocity greater than km/h
Table 3-4: Position and velocity accuracy
4.0 Electrical requirements
4.1 Power supply
4.1.1 Primary power
The Jupiter 20 GPS receiver is designed to operate from a single supply voltage, meeting the
requirements shown in Table 4‑1.
Parameter
J20
J20S
J20D
input voltage
2.9 to 3.6 VDC
2.9 to 3.6 VDC
2.9 to 3.6 VDC
current (typ) at full power (3.3 V)
75 mA
85 mA
80 mA
current (max)
100 mA
100 mA
100 mA
current (typ) at 20% TricklePower
TM
35 mA
60 mA
35 mA
battery backup voltage
2.4 V to 3.6 V
battery backup current
<10 µA typ at 25°C
maximum rise time
unlimited
ripple
not to exceed 50 mV peak to peak
Table 4-1: Operating power for the Jupiter 20
4.1.2 Low supply voltage detector
The module will enter a reset mode if the main supply drops below 2.8 V.
4.1.3 VCC_RF power supply
The VCC_RF (pad 20) provides a regulated 2.8 V power source. The specifications for this
supply are as follows:
voltage: 2.8 V ± 2%
current max: 25 mA for J20/J20S; 5 mA for J20D







































































