





























Chapter 2
PID Algorithms
©
National Instruments Corporation
2-7
LabWindows/CVI PID Control Toolkit User Manual
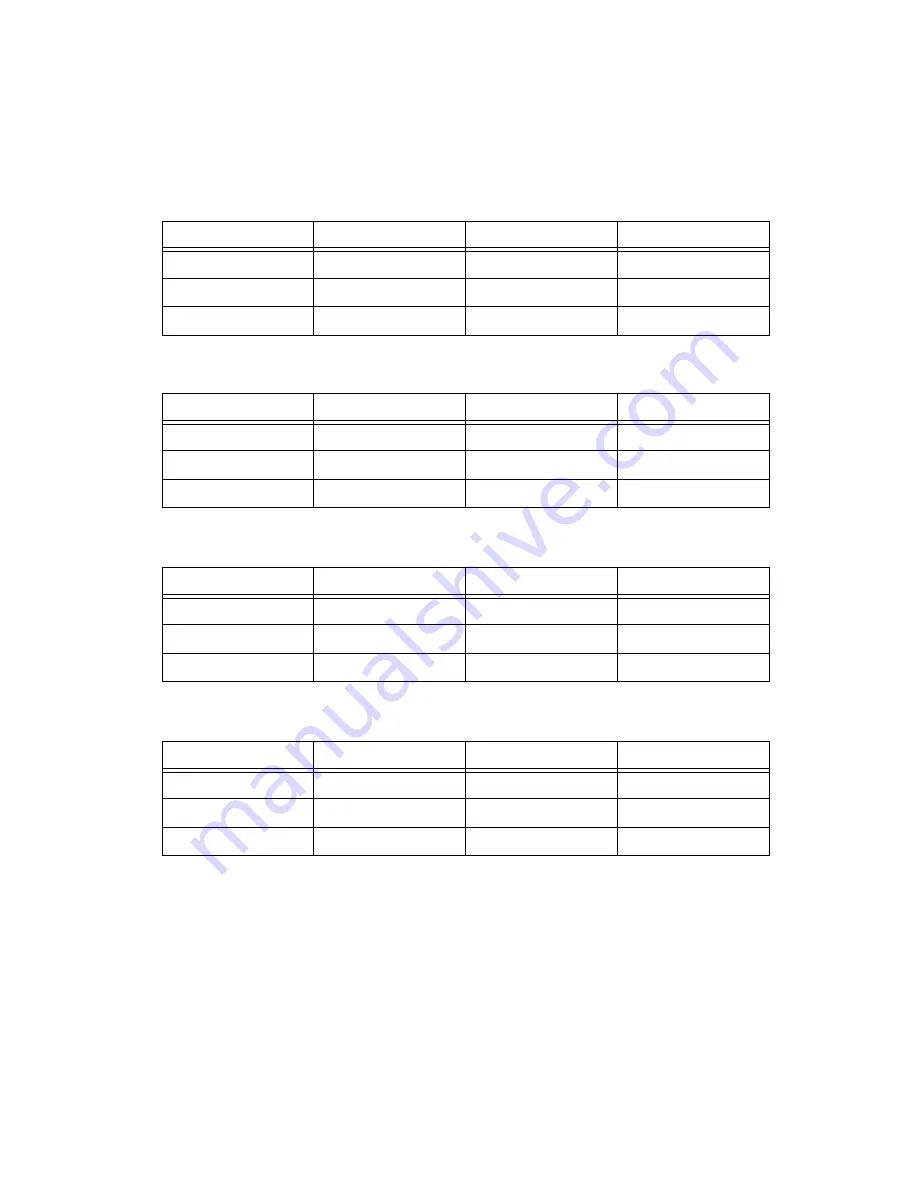
Table 2-2.
Tuning Formula under P-Only Control (Normal)
Controller
K
c
T
i
T
d
P
0.2
K
u
—
—
PI
0.18
K
u
0.8
T
u
—
PID
0.25
K
u
0.5
T
u
0.12
T
u
Table 2-3.
Tuning Formula under P-Only Control (Slow)
Controller
K
c
T
i
T
d
P
0.13
K
u
—
—
PI
0.13
K
u
0.8
T
u
—
PID
0.15
K
u
0.5
T
u
0.12
T
u
Table 2-4.
Tuning Formula under PI or PID Control (Fast)
Controller
K
c
T
i
T
d
P
T
p
/
τ
—
—
PI
0.9
T
p
/
τ
3.33
τ
—
PID
1.1
T
p
/
τ
2.0
τ
0.5
τ
Table 2-5.
Tuning Formula under PI or PID Control (Normal)
Controller
K
c
T
i
T
d
P
0.44
T
p
/
τ
—
—
PI
0.4
T
p
/
τ
5.33
τ
—
PID
0.53
T
p
/
τ
4.0
τ
0.8
τ







































































