

























Getting Started with AKD EtherCAT Drives and NI SoftMotion
|
© National Instruments
|
11
Connect Additional I/O On the X7 and X8 Connectors
Use the AKD X7 and X8 connectors to connect additional I/O such as limit switches, position
capture inputs, or other I/O as required by your application. Refer to the
AKD Installation
Manual
for information about connecting digital input and output devices to the AKD EtherCAT
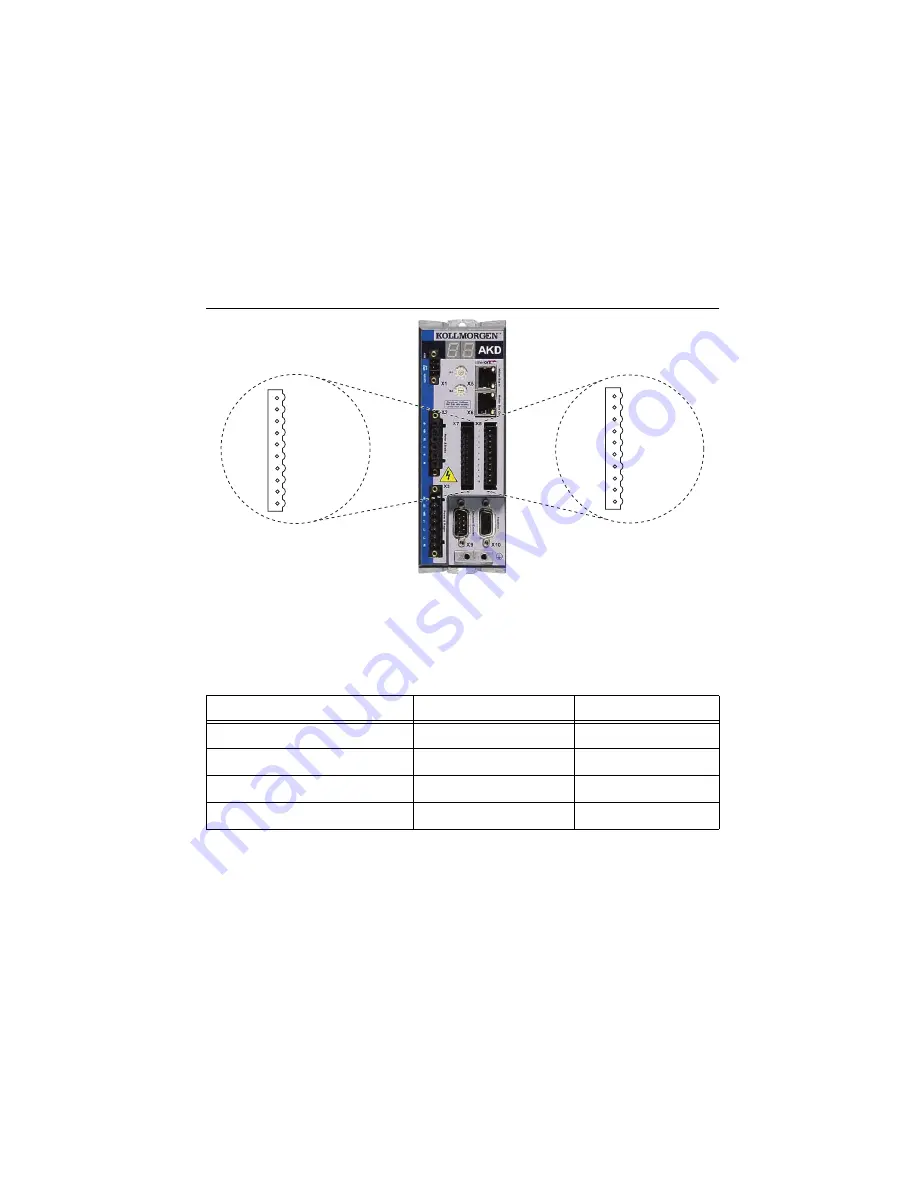
servo drive. Figure 9 shows the X7 and X8 connector pinout.
Figure 9.
AKD X7 and X8 Connectors
NI SoftMotion digital inputs and outputs are 0-based, while the digital inputs and outputs
on the AKD EtherCAT servo drive are 1-based. This means that Digital Input 1 on the AKD
corresponds to DI0 in the NI SoftMotion software. Table 1 shows the preset signal mapping for
the AKD EtherCAT servo drive in the NI SoftMotion software.
You can connect the AKD EtherCAT servo drive to sourcing or sinking digital output devices
depending on how the DCOM terminal on each connector is wired.
•
Sourcing
—Connect DCOM to the negative terminal on the +24 V supply.
•
Sinking
—Connect DCOM to the positive terminal on the +24 V supply.
Table 1.
AKD to NI SoftMotion Signal Mapping
AKD Connector Terminal
NI
S
oftMotion Pin
S
ignal Mapping
DI1 (X7 pin 10)
DI0
Home
DI2 (X7 pin 9)
DI1
Capture
DI3 (X7 pin 4)
DI2
Forward Limit
DI4 (X7 pin 3)
DI3
Reverse Limit
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
X7 Connector
X
8
Connector
DCOM X7
DI7
DI4
DI
3
DO2–
DO2+
DO1+
DO1–
DI2
DI1
F
au
lt
F
au
lt
DCOM X
8
En
ab
le
DI6
DI5
AO+
AGND
AI–
AI+







































































