





























12 USING A FULLY CLOSED LOOP SYSTEM
12.4 Startup
429
12
Checking position data of the load-side encoder
Precautions
Depending on the check items, MR Configurator2 may be used. Refer to "Help" of MR Configurator2 for the data displayed on
the MR Configurator2.
Check the load-side encoder mounting and parameter settings for any problems.
No.
Check item
Confirmation method and description
1
Reading the position data of the load-
side encoder
When a load-side encoder that is installed and connected correctly is operated, the value for load side
encoder cumulative feedback pulses is counted correctly.
If the value is not counted correctly, the following are likely causes.
(1) An alarm occurred.
(2) The load-side encoder is not installed correctly.
(3) The encoder cable is not wired correctly.
2
Reading the home position of the load-
side encoder
(reference mark, Z-phase)
If the home position (reference mark, or Z-phase) of the load-side encoder is in a normal condition
(mounting, connection, etc.), the value of load-side encoder information 1 is cleared to 0 when the load-side
encoder is moved to pass through the home position (reference mark, or Z-phase).
If the value is not cleared, the following are likely causes.
(1) The load-side encoder is not installed correctly.
(2) The encoder cable is not wired correctly.
3
Checking the load-side encoder
feedback direction
(setting the polarity of the load-side
encoder)
Move the device (load-side encoder) manually in servo-off status to confirm that the directions of the
cumulative feedback pulses of the servo motor encoder (after taking the gear into consideration) and the
load-side cumulative feedback pulses are matched.
If the directions are mismatched, reverse the polarity.
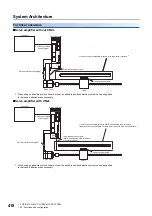
4
Setting the electronic gear for the load-
side encoder
When the servo motor and the load-side encoder move synchronously, the servo motor-side cumulative
feedback pulses (after taking the gear into consideration) and load side encoder cumulative feedback pulses
increase by the same amount.
If the cumulative feedback pulses are mismatched, use the following procedure to review the settings of the
fully closed loop control feedback electronic gear ([Pr. PE04 Fully closed loop control - Feedback pulse
electronic gear 1 - Numerator] and [Pr. PE05 Fully closed loop control - Feedback pulse electronic gear 1 -
Denominator]).
(1) Check the servo motor-side cumulative feedback pulses (before taking the gear into consideration).
(2) Check the load-side cumulative feedback pulses.
(3) Check that the ratio of (1) to (2) mentioned above is the same as the feedback electronic gear ratio.
+
-
Servo motor
Linear encoder
Servo motor-side cumulative
feedback pulses (after gear)
(3) Electronic gear
(2) Load-side encoder cumulative feedback pulses
Command
(1) Servo motor-side cumulative
feedback pulses (before gear)
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































