





























Appendix-616
Spline interpolation
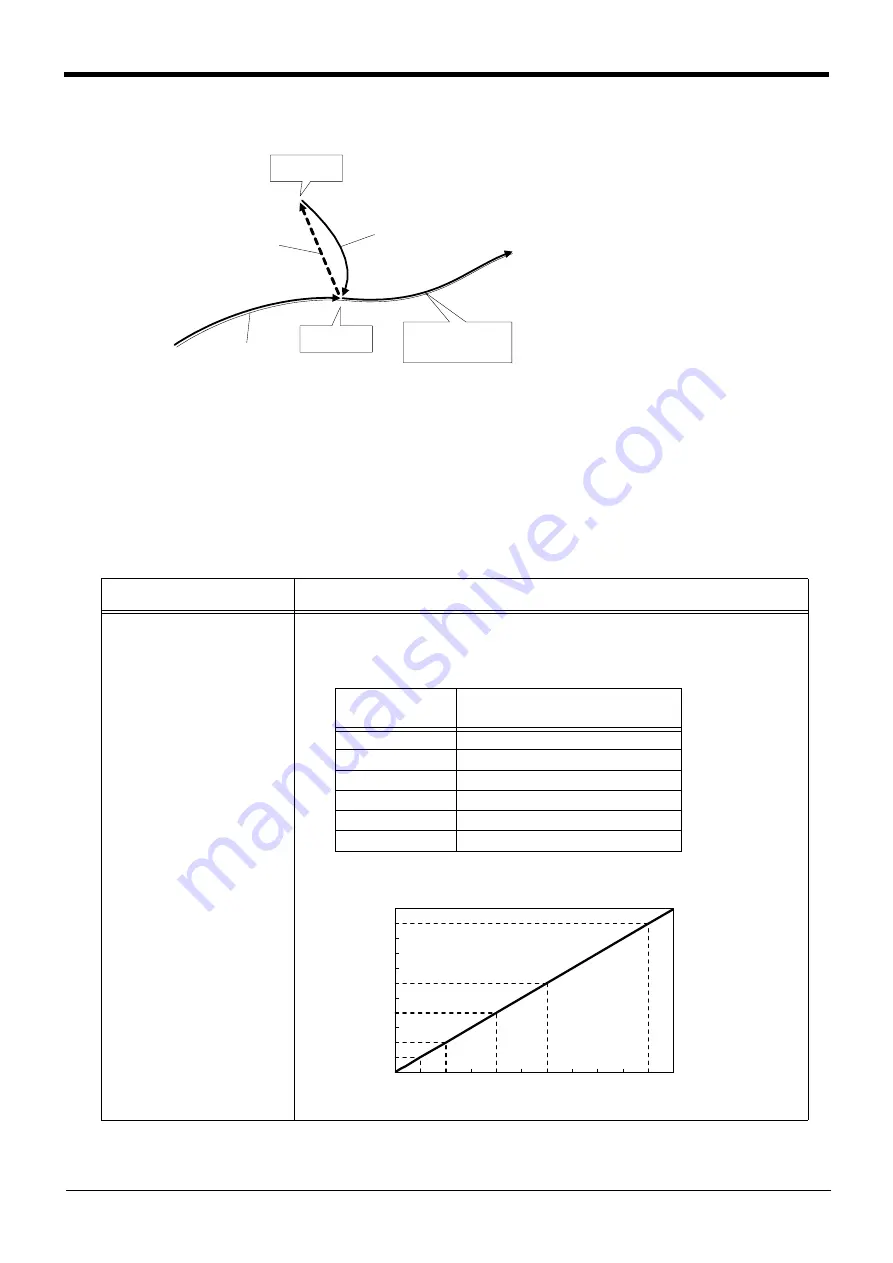
operation. The robot will return to the halted position with joint interpolation. The parameter RETPATH (set-
ting for automatic return after jog feed during halt) setting is not applied.
Fig.7-12:Behavior during halt and resume
• After operation is halted during spline interpolation with a stop input, etc., if the halted robot program is
read into the teaching pendant or RT ToolBox2 program edit screen, the spline interpolation halt position
information will be reset. Thus, if operation is resumed from the halted line, the robot will move to the spline
interpolation start position before resuming operation.
(4) Check related to path points
The check listed in
is preformed on each path point.
Table 7-5:Check related to path points
Type
Explanation
Distance between path points
The program is checked to confirm there is adequate distance between two adjacent path
points. The appropriate distance differs according to the designated speed, and if two path
points are too close for the speed, error L2611 (path points too close) will occur.
Refer to the following table and graph, and determine the command speed and distance
between path points.
The command speed in the table can be obtained with the following formula.
Command speed = (<Speed> of MvSpl command) × (Ovrd command)
スプライン補間
運転を中断
ジョグ操作
運転を再開
関節補間
中断位置からスプ
ライン補間を再開
Resume
operation
Restart spline
interpolation from
halt position
Halt
operation
Jog operation
Joint interpolation
Spline interpolation
Command speed
[mm/s]
Required distance between path points
10
0.6 mm or more
20
1.2 mm or more
50
3.0 mm or more
100
6.0 mm or more
200
12.0 mm or more
500
30.0 mm or more
0
3
6
9
12
15
18
21
24
27
30
33
0
50
100 150 200 250 300 350 400 450 500 550
R
equir
ement dist
ance
betwee
n p
ath point
s
[mm]
Command speed [mm/s]





















































